
Buildroot 开发¶
Buildroot 是 Linux 平台上一个构建嵌入式 Linux 系统的框架。整个 Buildroot 是由 Makefile(*.mk) 脚本和 Kconfig(Config.in) 配置文件构成的。你可以和编译 Linux 内核一样,通过 buildroot 配置,menuconfig 修改,编译出一个完整的可以直接烧写到机器上运行的 Linux 系统软件(包含 boot、kernel、rootfs 以及 rootfs 中的各种库和应用程序)。
目录结构¶
buildroot/
├── arch # CPU 架构的构建、配置文件
├── board # 具体单板相关的文件
├── boot # Bootloaders 的构建、配置文件
├── build
├── CHANGES # Buildroot 修改日志
├── Config.in
├── Config.in.legacy
├── configs # 具体单板的 Buildroot 配置文件
├── COPYING
├── DEVELOPERS
├── dl # 下载的程序、源码压缩包、补丁等
├── docs # 文档
├── fs # 各种文件系统的构建、配置文件
├── linux # Linux 的构建、配置文件
├── Makefile
├── Makefile.legacy
├── output # 编译输出目录
├── package # 所有软件包的构建、配置文件
├── README # Buildroot 简单说明
├── support # 为 Bulidroot 提供功能支持的脚本、配置文件
├── system # 制作根文件系统的构建、配置文件
├── toolchain # 交叉编译工具链的构建、配置文件
└── utils # 实用工具
配置¶
选择默认配置文件:
# 进入 SDK 根目录
cd path/to/SDK/
# 选择配置文件
# `configs/rockchip_rk3399_defconfig`
source envsetup.sh rockchip_rk3399
执行完成后会生成编译输出目录,output/rockchip_rk3399,后续也可以在该目录下执行 make 相关操作。
软件包配置¶
打开配置界面:
make menuconfig
我们可以在配置界面添加或裁剪一些工具,按需求定制系统功能。以添加 qt53d 为例:
输入 / 进入搜索界面,输入要查找的内容 qt53d,按回车进行搜索:
选择 1 跳转到对应页面,按空格选中配置:
配置完成后,移动到 Save 按回车保存到 .config;移动到 Exit 按回车退出。

保存配置文件:
make savedefconfig
将修改保存到配置文件 configs/rockchip_rk3399_defconfig。
Busybox 配置¶
打开配置界面,进行配置:
make busybox-menuconfig
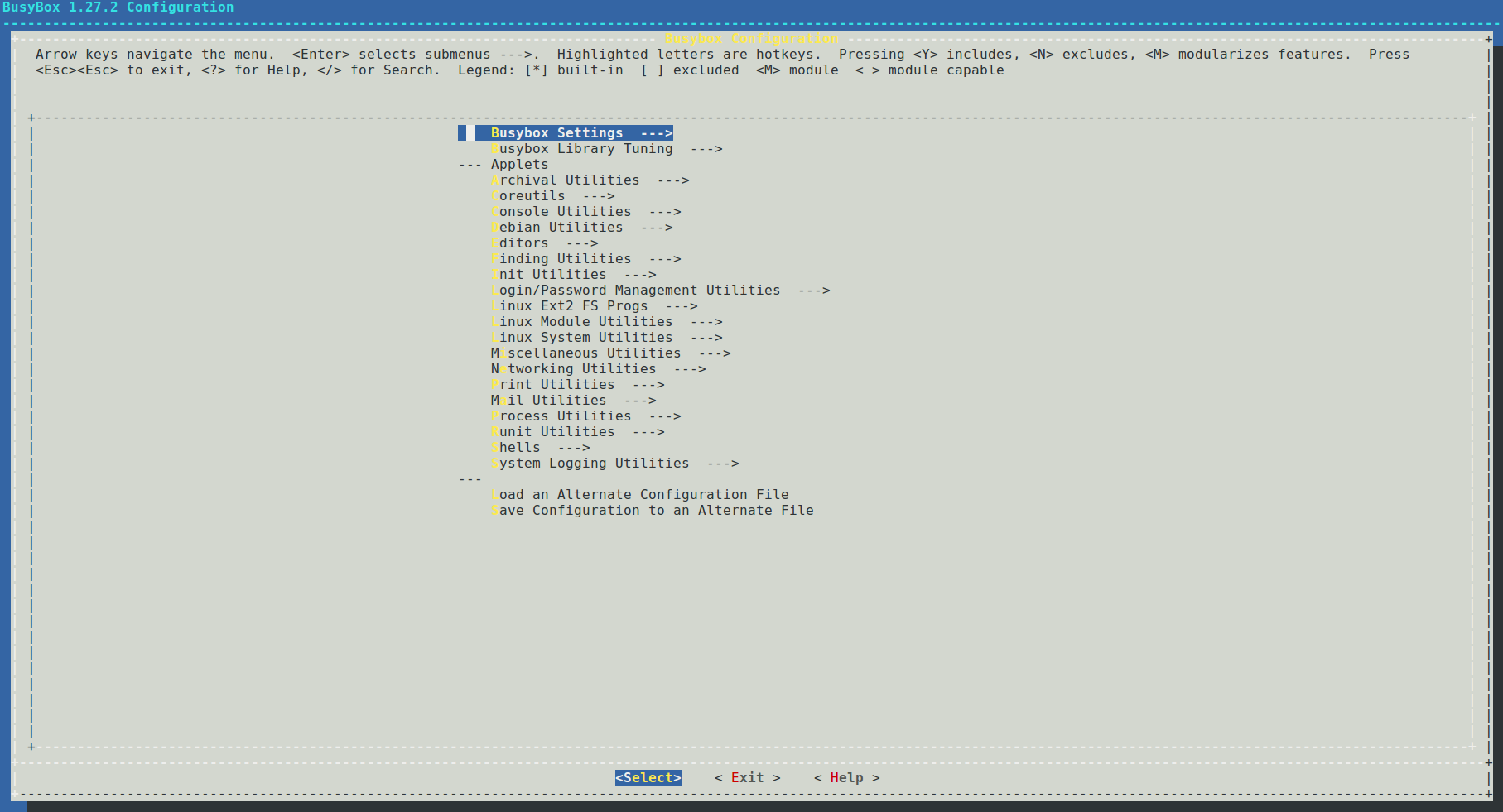
配置完成后,移动到 Exit 按回车退出,在弹窗页面选择 Yes 保存到 .config。
保存配置文件:
make busybox-update-config
将修改保存到配置文件 board/rockchip/common/base/busybox.config。
编译¶
配置好 Buildroot 后,直接运行 make 进行编译。
编译说明¶
运行 make 进行编译时,会执行以下过程:
下载源码;
配置、编译、安装交叉编译工具链;
配置、编译、安装选择的软件包;
按选择的格式生成根文件系统;
关于 make 的更多用法,可通过 make help 获得。
编译软件包¶
我们可以执行 make <package> 单独编译某个软件包。软件包的编译主要包括下载,解压,打补丁,配置,编译,安装等过程,具体可以查看 package/pkg-generic.mk。
下载
Buildroot 会根据配置
package/<package>/<package>.mk,自动从网络获取对应的软件包,包括一些第三方库,插件,实用工具等,放在dl/目录。解压
软件包会解压在
output/rockchip_rk3399/build/<package>-<version>目录下。打补丁
补丁集中放在
package/<packgae>/目录,Buildroot 会在解压软件包后为其打上相应的补丁。如果要修改源码,可以通过打补丁的方式进行修改。配置
编译
安装
编译完成后,会将需要的编译生成文件拷贝到
output/rockchip_rk3399/target/目录。
对于某个软件包,我们可以通过 make <package>-<target> 调用软件包构建中的某一步骤,如下:
Package-specific:
<pkg> - Build and install <pkg> and all its dependencies
<pkg>-source - Only download the source files for <pkg>
<pkg>-extract - Extract <pkg> sources
<pkg>-patch - Apply patches to <pkg>
<pkg>-depends - Build <pkg>'s dependencies
<pkg>-configure - Build <pkg> up to the configure step
<pkg>-build - Build <pkg> up to the build step
<pkg>-graph-depends - Generate a graph of <pkg>'s dependencies
<pkg>-dirclean - Remove <pkg> build directory
<pkg>-reconfigure - Restart the build from the configure step
<pkg>-rebuild - Restart the build from the build step
编译输出目录¶
编译完成后,在编译输出目录 output/rockchip_rk3399 会生成子目录,说明如下:
build/包含所有的源文件,包括 Buildroot 所需主机工具和选择的软件包,这个目录包含所有软件包源码。host/主机端编译需要的工具,包括交叉编译工具。images/包含压缩好的根文件系统镜像文件。staging/这个目录类似根文件系统的目录结构,包含编译生成的所有头文件和库,以及其他开发文件,不过他们没有裁剪,比较庞大,不适用于目标文件系统。target/包含完整的根文件系统,对比staging/,它没有开发文件,不包含头文件,二进制文件也经过strip处理。
交叉编译工具¶
Buildroot 编译完成后,会在 output/rockchip_rk3399/host/ 目录下,生成交叉编译工具,我们可以用来编译目标程序。
交叉编译工具目录
output/rockchip_rk3399/host/bin/
编译示例 hello.c
#include <stdio.h>
#include <stdlib.h>
int main(int argc, char *argv[])
{
printf("Hello World!\n");
return 0;
}
编译
.../host/bin/arm-buildroot-linux-gnueabihf-gcc hello.c -o hello
运行
将可执行程序 hello 拷贝到设备,运行 ./hello,则会看到打印信息 Hello World!。
重建¶
对于重建的具体说明,可以查看文档 buildroot/docs/manual/rebuilding-packages.txt。
重建软件包¶
在开发过程中,若修改了某个软件包的源码,Buildroot 是不会重新编译该软件包的。可以按如下方式操作:
方式一
make <package>-rebuild
方式二
# 删除软件包的编译输出目录
rm -rf output/rockchip_rk3399/build/<package>-<version>
# 编译
make <package>
完全重建¶
当通过 make menuconfig,make xconfig 或其他配置工具之一更改系统配置时,Buildroot 不会尝试检测应重建系统的哪些部分。在某些情况下,Buildroot 应该重建整个系统,在某些情况下,仅应重建软件包的特定子集。但是以完全可靠的方式检测到这一点非常困难,因此 Buildroot 开发人员已决定不尝试这样做。
何时需要完全重建¶
更改目标体系结构配置时,需要完全重建;
更改工具链配置时,需要完全重建;
将其他软件包添加到配置中时,不一定需要完全重建;
从配置中删除软件包时,Buildroot 不会执行任何特殊操作。它不会从目标根文件系统或工具链中删除此软件包安装的文件。需要完全重建才能删除这些文件;
更改软件包的子选项时,不会自动重建软件包;
对根文件系统框架进行更改时,需要完全重建;
一般而言,当你遇到构建错误并且不确定所做的配置更改可能带来的后果时,请进行完全重建。具体说明可以查看文档 rebuilding-packages.txt。
新增本地源码包¶
开发过程中,Buildroot 自带的软件包有时可能无法满足我们的需求,为此我们需要添加自定义的软件包。Buildroot 支持多种格式的软件包,包括 generic-package、cmake-package、autotools-package 等,我们以 generic-package 举例说明。
创建工程目录
cd path/to/SDK/
mkdir buildroot/package/rockchip/firefly_demo/
新建 Config.in
在 firefly_demo/ 下添加 Config.in:
config BR2_PACKAGE_FIREFLY_DEMO
bool "Simple Firefly Demo"
新建 firefly_demo.mk
在 firefly_demo/ 下添加 firefly_demo.mk:
##################################################
###########
#
### firefly_demo
#
##################################################
###########
ifeq ($(BR2_PACKAGE_FIREFLY_DEMO), y)
FIREFLY_DEMO_VERSION:=1.0.0
FIREFLY_DEMO_SITE=$(TOPDIR)/../external/firefly_demo/src
FIREFLY_DEMO_SITE_METHOD=local
define FIREFLY_DEMO_BUILD_CMDS
$(TARGET_MAKE_ENV) $(MAKE) CC=$(TARGET_CC) CXX=$(TARGET_CXX) -C $(@D)
endef
define FIREFLY_DEMO_CLEAN_CMDS
$(TARGET_MAKE_ENV) $(MAKE) -C $(@D) clean
endef
define FIREFLY_DEMO_INSTALL_TARGET_CMDS
$(TARGET_MAKE_ENV) $(MAKE) -C $(@D) install
endef
define FIREFLY_DEMO_UNINSTALL_TARGET_CMDS
$(TARGET_MAKE_ENV) $(MAKE) -C $(@D) uninstall
endef
$(eval $(generic-package))
endif
创建源码目录
上文的 Makefile 文件里已经指定了源码目录 external/firefly_demo/src。
cd path/to/SDK/
mkdir external/firefly_demo/src
编写源码 firefly_demo.c
在 firefly_demo/src/ 下添加 firefly_demo.c:
#include <stdio.h>
#include <stdlib.h>
int main(int argc, char *argv[])
{
printf("Hello World!\n");
return 0;
}
编写 Makefile
在 firefly_demo/src/ 下添加 Makefile:
DEPS =
OBJ = firefly_demo.o
CFLAGS =
%.o: %.c $(DEPS)
$(CC) -c -o $@ $< $(CFLAGS)
firefly_demo: $(OBJ)
$(CXX) -o $@ $^ $(CFLAGS)
.PHONY: clean
clean:
rm -f *.o *~ firefly_demo
.PHONY: install
install:
cp -f firefly_demo $(TARGET_DIR)/usr/bin/
.PHONY: uninstall
uninstall:
rm -f $(TARGET_DIR)/usr/bin/firefly_demo
修改上一级 Config.in
在 buildroot/package/rockchip/Config.in 末尾添加一行:
source "package/rockchip/firefly_demo/Config.in"
配置软件包
打开配置菜单 make menuconfig,找到 firefly_demo 并选中配置。
编译
# 编译 firefly_demo
make firefly_demo
# 打包进根文件系统
make
# 若修改源码,重新编译软件包
make firefly_demo-rebuild
rootfs-overlay¶
rootfs-overly 是一个相当不错的功能,它能够在目标文件系统编译完成后将指定文件覆盖到某个目录。通过这种方式,我们可以方便地添加或修改一些文件到根文件系统。
假设我们要在根文件系统的 /etc/ 目录下添加文件 overlay-test,可以按如下步骤操作:
设置 rootfs-overlay 根目录
打开配置菜单 make menuconfig,通过设置 BR2_ROOTFS_OVERLAY 选项,添加用于覆盖的根目录。对于 rk3399,默认已添加了目录 board/rockchip/rk3399/fs-overlay/。
添加文件到覆盖目录
cd buildroot/board/rockchip/rk3399/fs-overlay/
mkdir etc/
touch etc/overlay-test
编译
make
下载根文件系统
将编译好的根文件系统 output/rockchip_rk3399/images/rootfs.ext2 下载到设备。启动设备,可以看到已添加文件 /etc/overlay-test。
也可以通过查看 target/ 目录,验证是否添加成功:
ls buildroot/output/rockchip_rk3399/target/etc/overlay-test
交叉编译 Qt-5.12.2¶
交叉编译工具链¶
Firefly 提取了 Buildroot 的交叉编译工具链,用户可以直接使用该工具链开发 Buildroot 上的 Qt 应用程序,而无需下载编译 SDK 代码。
工具链支持 EGLFS、LinuxFB、Wayland 等插件。
使用环境:
主机:x86-64 / Ubuntu 16.04/18.04
设备: Firefly RK3399 RK3288 PX30 .. / Buildroot
下载¶
对于 32位芯片,如 rk3288,下载 firefly-qt-5.12.2-arm.tar.gz;对于其它 64位芯片,如 rk3399,下载 firefly-qt-5.12.2-aarch64.tar.gz。
下载链接(提取码:6dg7)
下文将以 firefly-qt-5.12.2-aarch64.tar.gz 为例进行说明。
目录结构¶
解压下载好的压缩包:
tar -zxvf firefly-qt-5.12.2-aarch64.tar.gz
目录结构:
firefly-qt-5.12.2-aarch64/
├── aarch64.tar.gz # 用于 Qt 程序运行的库文件、插件等
├── demo
│ └── mainwindow # demo 程序
├── firefly-qt-5.12.2-aarch64 # 交叉编译工具链
└── ReadMe # 使用说明
配置交叉编译环境¶
将工具链拷贝到主机的指定目录:
cd firefly-qt-5.12.2-aarch64/
# 该目录 `/opt/` 不可修改
cp -rdf firefly-qt-5.12.2-aarch64 /opt/
若拷贝失败,先修改下目录权限,再执行上述操作:
sudo chmod 777 /opt/
交叉编译¶
以 demo 程序为例,运行如下命令:
cd demo/mainwindow/
/opt/firefly-qt-5.12.2-aarch64/host/bin/qmake
make
编译完成后,会生成可执行程序 demo/mainwindow/mainwindow。
配置运行环境¶
使用 U盘将 aarch64.tar 拷贝到设备上:
cp /media/usb0/aarch64.tar /userdata/
解压:
cd /userdata/
tar -xvf aarch64.tar
将文件拷贝到对应目录:
cd aarch64/
cp -rdf usr/lib/* /usr/lib/
cp -rdf usr/qml/* /usr/qml/
cp usr/bin/gdbserver /usr/bin/
运行程序¶
将编译好的可执行程序 mainwindow 拷贝到设备上。
默认板子运行了 Wayland 桌面环境,按如下方式运行:
# 设置环境变量
export XDG_RUNTIME_DIR=/tmp/.xdg
# 运行
./mainwindow -platform wayland
使用 eglfs 插件运行:
# 退出 Wayland 桌面环境
/etc/init.d/S50launcher stop
# 运行
./mainwindow -platform eglfs
Qt Creator¶
下面介绍 Qt Creator 的使用说明,在操作前,请先按前面的步骤配置好交叉编译环境和运行环境。
配置¶
安装完成后,启动 Qt Creator,打开菜单 Tools -> Options,找到 Kits。
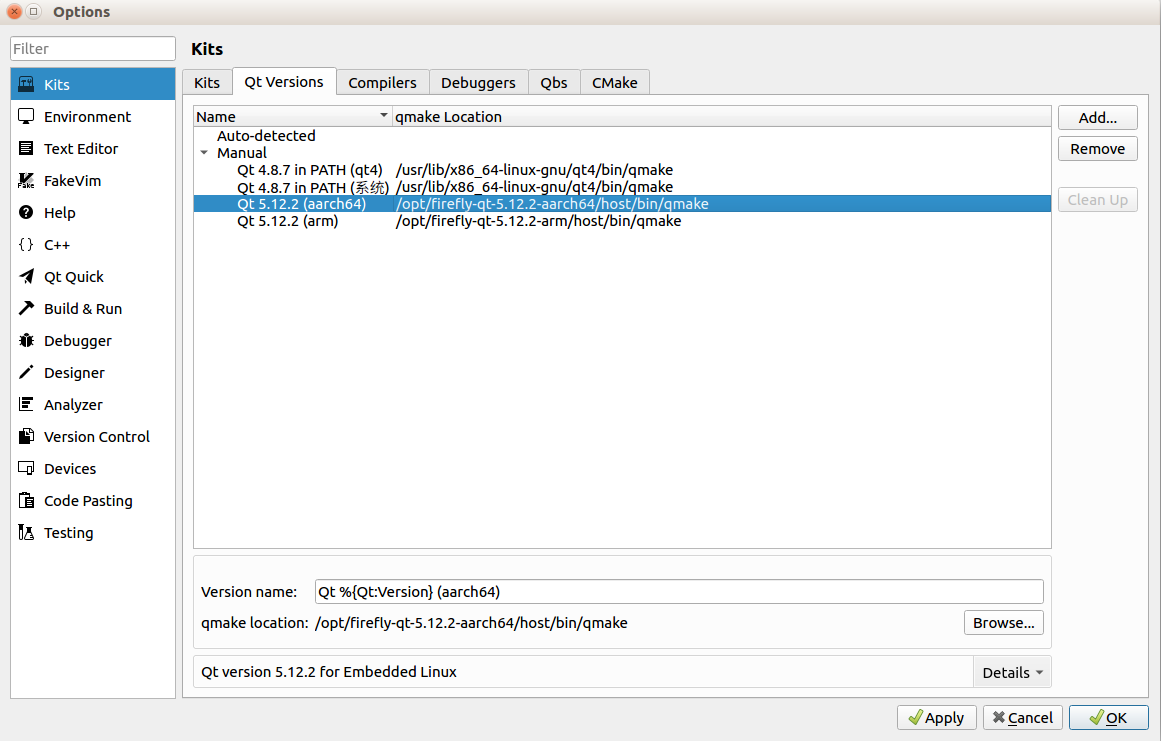
配置 Qt Versions
qmake:
/opt/firefly-qt-5.12.2-aarch64/host/bin/qmake
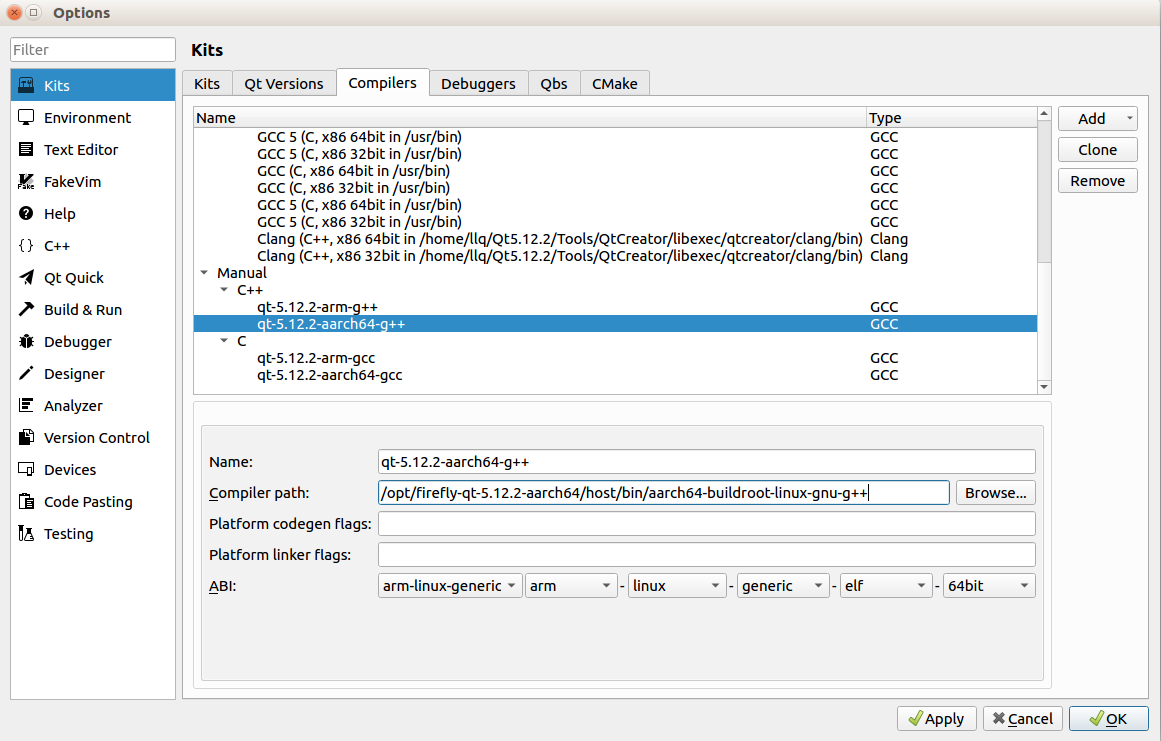
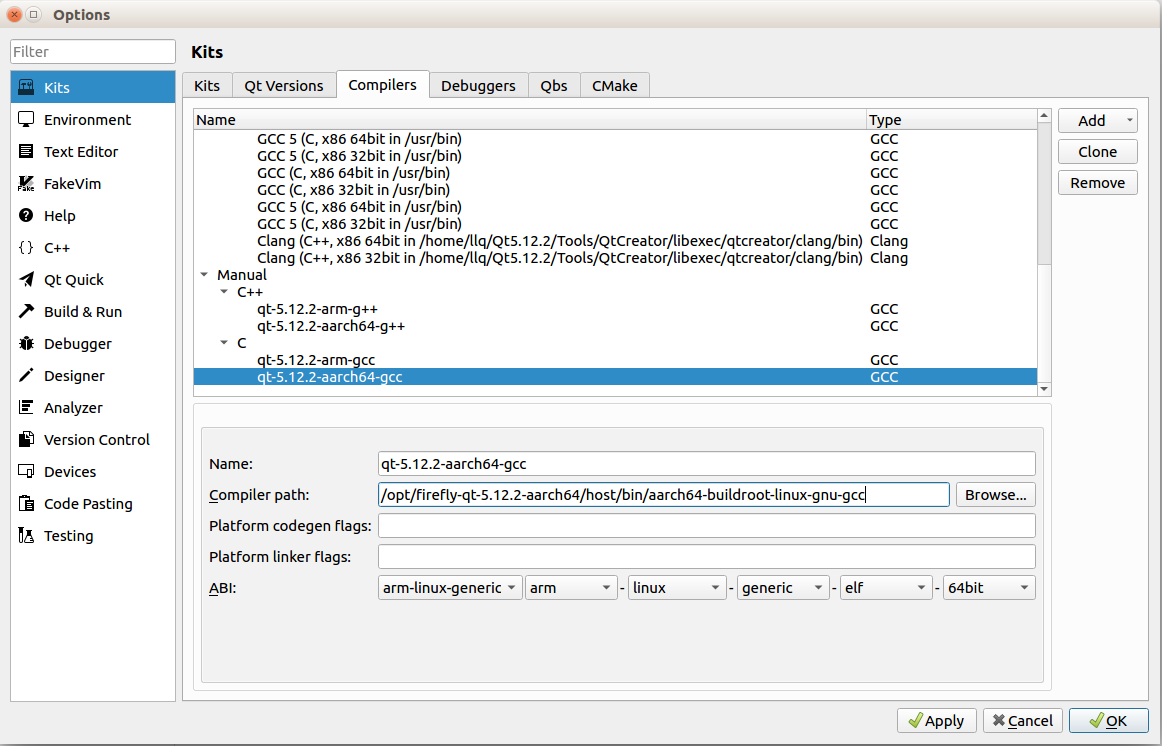
配置 Compilers
g++:
/opt/firefly-qt-5.12.2-aarch64/host/bin/aarch64-buildroot-linux-gnu-g++gcc:
/opt/firefly-qt-5.12.2-aarch64/host/bin/aarch64-buildroot-linux-gnu-gcc
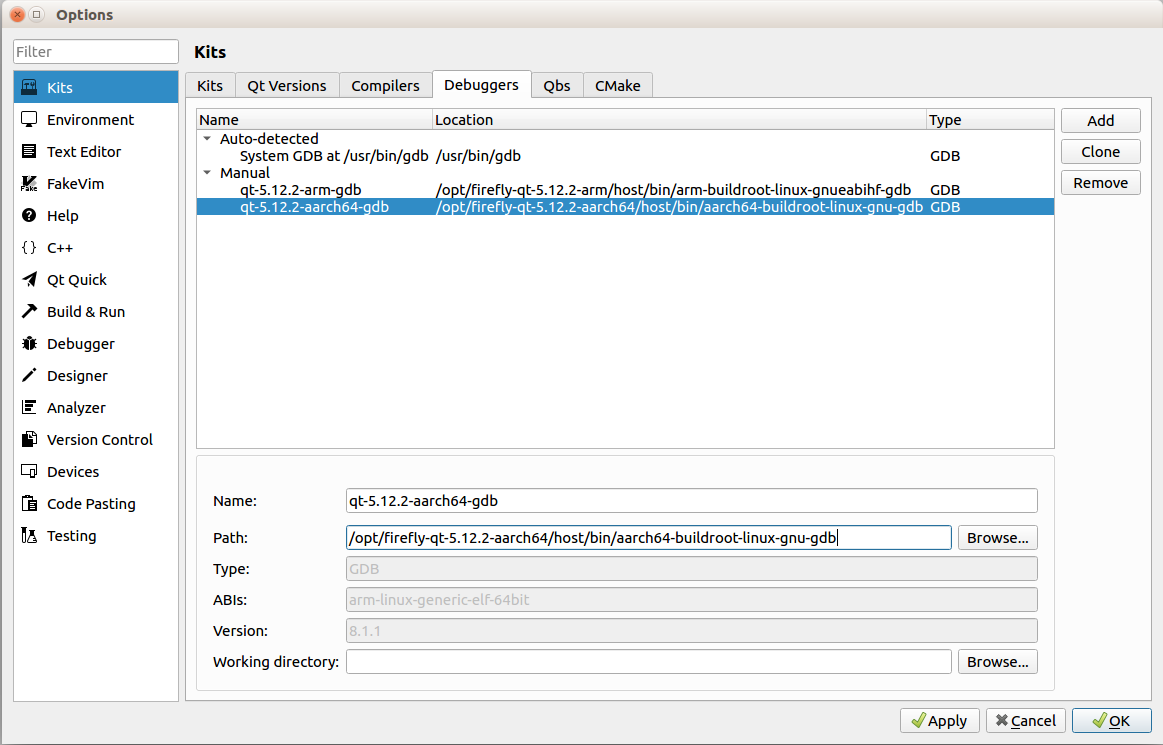
为方便调试,配置 Debuggers 和 Devices 用于在线调试:
配置 Debuggers
gdb:
/opt/firefly-qt-5.12.2-aarch64/host/bin/aarch64-buildroot-linux-gnu-gdb
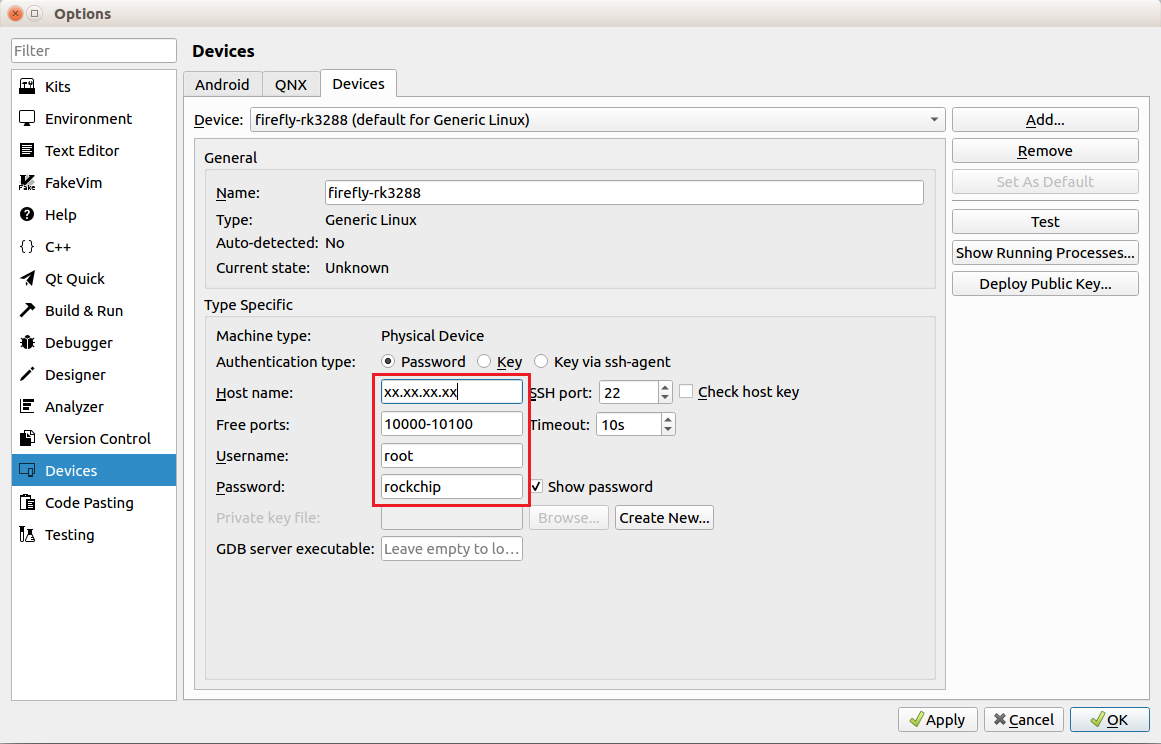
配置 Devices
设置好设备的 IP、用户名(root)和密码(rockchip)。为了方便调试,可以在设备上设置静态 IP。
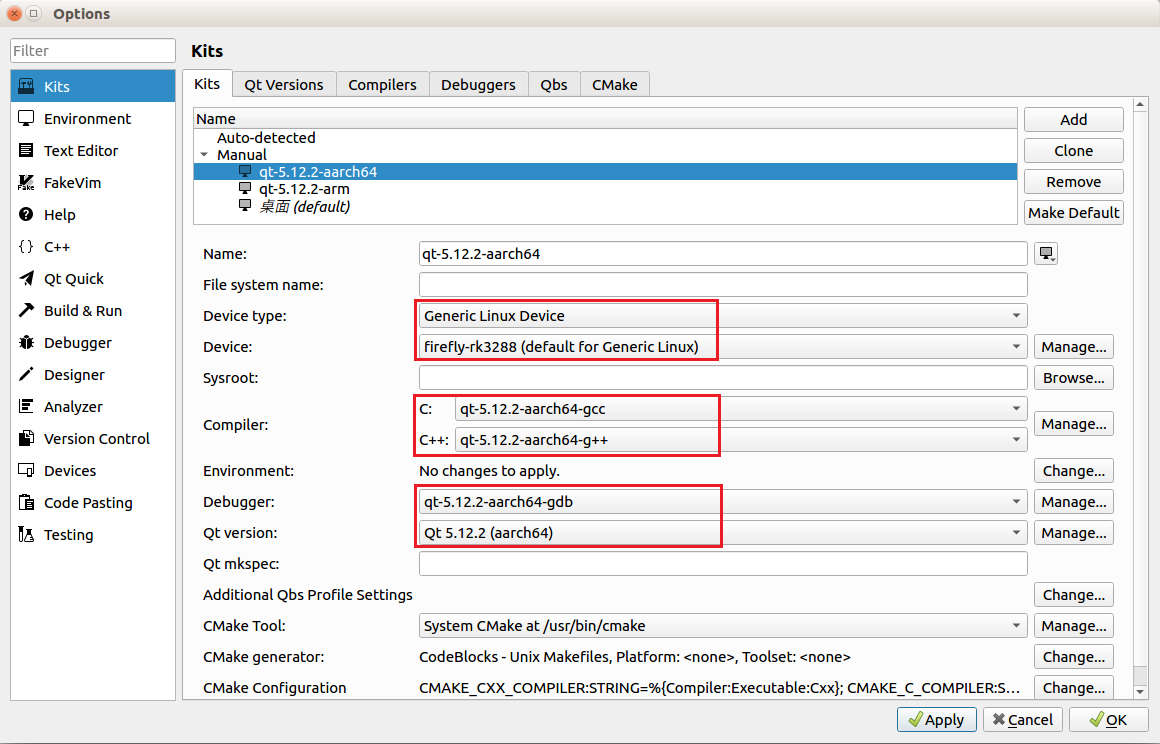
配置 Kits
将前面设置的配置项添加到 Kits。
编译运行¶
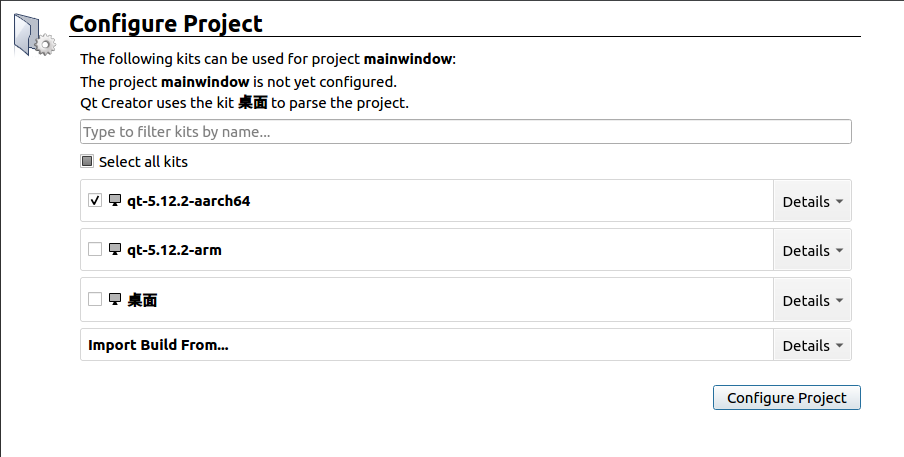
打开 demo 程序,Welcome -> Open Project,选择要使用的 Kits:
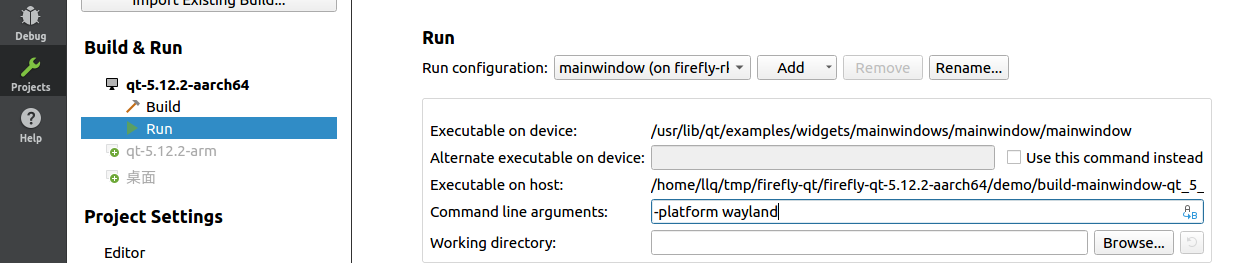
之后打开 Projects -> Run,配置命令行参数,这里设置为 -platform wayland:
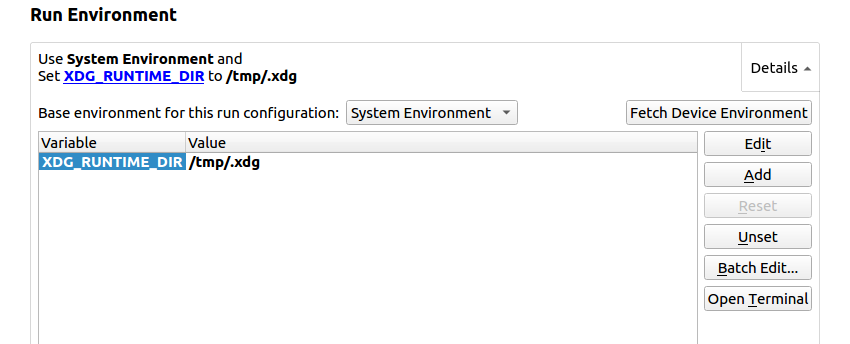
配置环境变量,即 export XDG_RUNTIME_DIR=/tmp/.xdg:
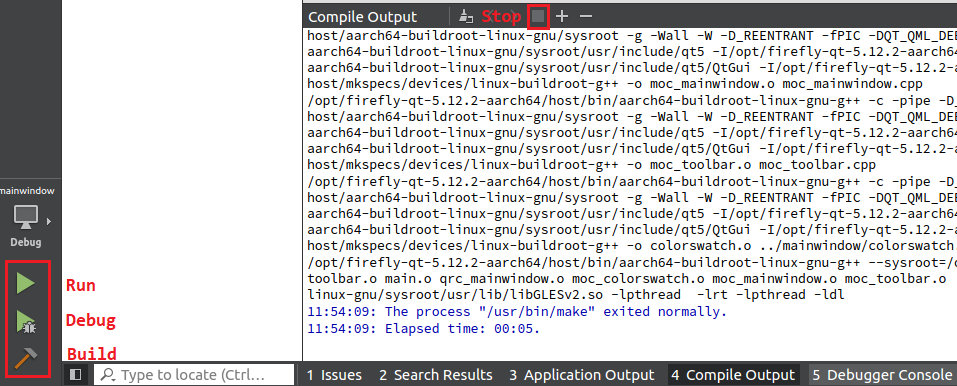
编译运行:
点击 Build 交叉编译 Qt 程序;点击 Run 或 Debug 在设备上运行或调试程序。要重新运行程序时,记得手动点击 Stop 关闭已经运行的程序。
编译生成目录在 demo/build-mainwindow-qt_5_12_2_aarch64-Debug。
桌面应用¶
官方发布的 Buildroot 固件,默认已支持 Wayland 桌面环境以及一些 Qt 应用,如下图:
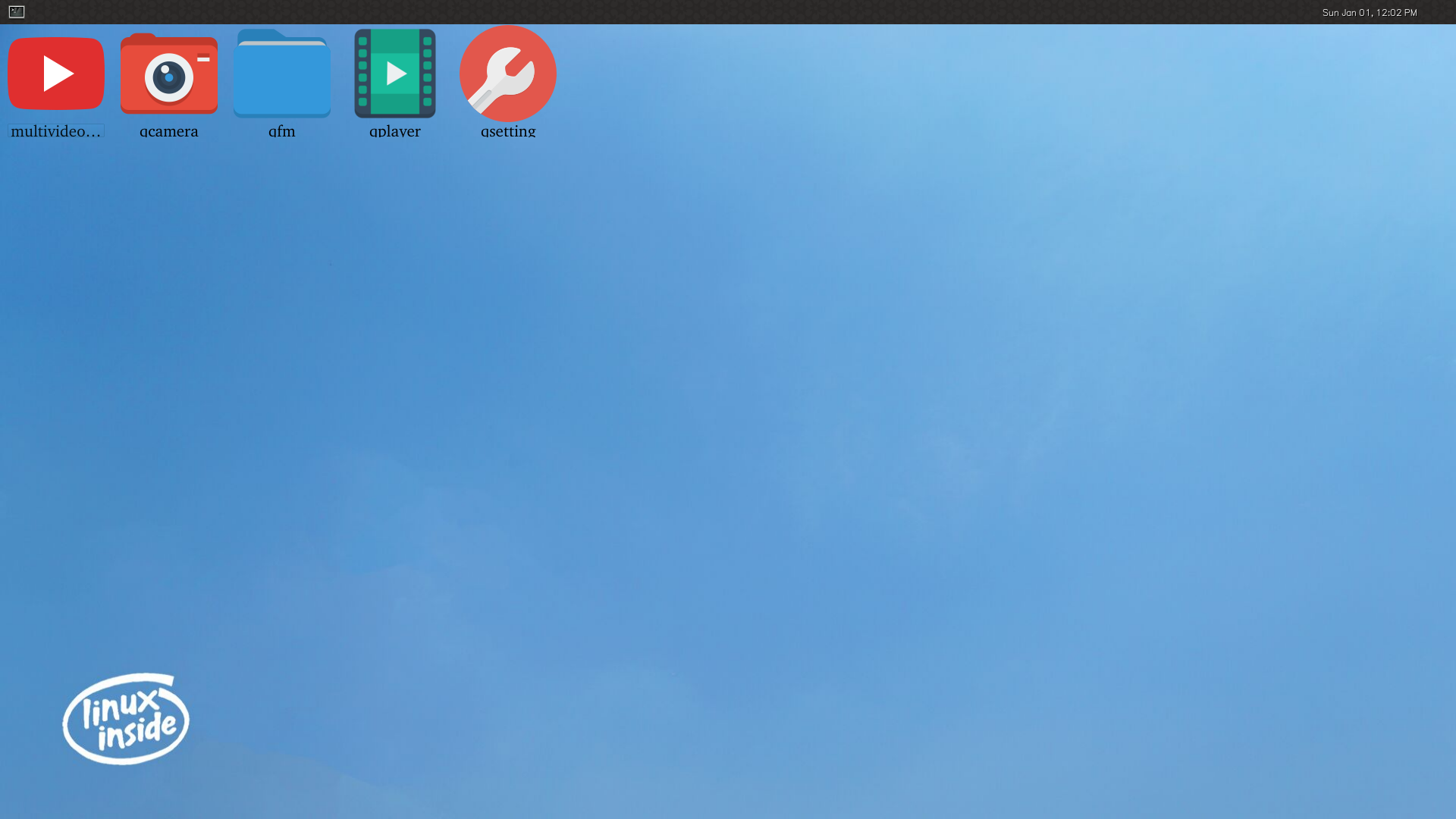
这些 Qt 应用提供了一些基础功能,如,摄像头预览,文件管理器,多媒体播放器,WiFi 连接等。
用户和密码¶
用户:root
密码:rockchip
WiFi 连接¶
# wifi_start.sh wifi-ssid password
wifi_start.sh wifi-test 12345678
音/视频播放¶
# 播放 wav
aplay test.wav
gstwavplay.sh test.wav
# 播放 mp3
mp3play.sh test.mp3
gstmp3play.sh test.mp3
# 播放 mp4
gstmp4play.sh test.mp4
gstvideoplay.sh test.mp4
SSH¶
Buildroot 默认已支持 SSH 服务。
ssh 登录设备
让设备处于联网状态,在 PC 端执行登录命令:
# 用户:root;密码:rockchip
# IP:192.168.27.129
~$ ssh root@192.168.27.129
The authenticity of host '192.168.27.129 (192.168.27.129)' can't be established.
ECDSA key fingerprint is SHA256:+NwFawDiU0EwLHRFrIA/7snmlMc9ZfN6Nxa5vUSC7Pg.
Are you sure you want to continue connecting (yes/no)? yes
Warning: Permanently added '192.168.27.129' (ECDSA) to the list of known hosts.
root@192.168.27.129's password:
[root@rk3399:~]#
scp
在 PC 端执行命令,拷贝文件到设备:
~$ scp ./file root@192.168.27.129:/
root@192.168.27.129's password:
file 100% 154 0.2KB/s 00:00
MIPI 摄像头(OV13850)¶
查看 ISP 驱动是否加载成功,成功可以看到如下设备信息:
root@firefly:~# grep '' /sys/class/video4linux/video*/name
/sys/class/video4linux/video0/name:rkisp1_mainpath
/sys/class/video4linux/video1/name:rkisp1_selfpath
/sys/class/video4linux/video2/name:rkisp1_dmapath
/sys/class/video4linux/video3/name:rkisp1-statistics
/sys/class/video4linux/video4/name:rkisp1-input-params
root@firefly:~# ls /dev/video*
video0 video1 video2 video3 video4
查看 OV13850 设备是否注册成功,成功可以看到如下打印:
root@firefly:~# dmesg |grep 13850
[ 3.911130] ov13850 3-0010: driver version: 00.01.03
[ 3.911168] ov13850 3-0010: GPIO lookup for consumer reset
[ 3.911171] ov13850 3-0010: using device tree for GPIO lookup
[ 3.911187] of_get_named_gpiod_flags: parsed 'reset-gpios' property of node '/i2c@ff150000/ov13850@10[0]' - status (0)
[ 3.911370] ov13850 3-0010: could not get default pinstate
[ 3.911373] ov13850 3-0010: could not get sleep pinstate
[ 3.911376] ov13850 3-0010: GPIO lookup for consumer pwdn
[ 3.911379] ov13850 3-0010: using device tree for GPIO lookup
[ 3.911403] of_get_named_gpiod_flags: parsed 'pwdn-gpios' property of node '/i2c@ff150000/ov13850@10[0]' - status (0)
# 成功获取设备 ID
[ 3.914401] ov13850 3-0010: Detected OV00d850 sensor, REVISION 0xb2
预览:
gst-launch-1.0 v4l2src device=/dev/video0 ! video/x-raw,format=NV12,width=640,height=480, framerate=30/1 ! videoconvert ! kmssink &
# 或者
export XDG_RUNTIME_DIR=/tmp/.xdg
gst-launch-1.0 v4l2src device=/dev/video0 ! video/x-raw,format=NV12,width=640,height=480, framerate=30/1 ! videoconvert ! waylandsink &
恢复出厂设置¶
Buildroot 支持恢复出厂设置。直接运行 update 或者加上 factory/reset 参数均可进入 recovery 恢复出厂设置。
注意:此出厂设置表示恢复为设备最后一次升级固件之后的初始状态。
update
# 或者
update factory / update reset
升级固件¶
Buildroot 支持从外部存储设备升级固件,以下是升级流程说明。
制作升级固件
按照正常的固件编译流程,制作用于升级的固件。《编译 Buildroot 固件》
升级固件不一定要全分区升级,可修改 package-file 文件,将不要升级的分区去掉,这样可以减少升级包的大小。
例如,修改文件 tools/linux/Linux_Pack_Firmware/rockdev/rk3399-package-file,将 rootfs 的相对路径改为 RESERVED,这样就不会打包根文件系统,即不升级根文件系统分区。
# name relative path
#
#hwdef hwdef
package-file package-file
bootloader image/miniloaderall.bin
parameter image/parameter.txt
trust image/trust.img
uboot image/uboot.img
misc image/misc.img
boot image/boot.img
recovery image/recovery.img
rootfs RESERVED
oem image/oem.img
userdata:grow image/userdata.img
backup RESERVED
将制作好的升级固件拷贝到 U 盘、TF 卡或者设备的 /userdata/ 目录下,重命名为 update.img。
注意: 若将升级固件放至设备的 /userdata/ 目录,则不要打包 userdata.img,将 image/userdata.img 改为 RESERVED。
升级
启动设备,在命令行执行升级命令,update ota path/to/update.img,设备会进入 recovery 进行升级。
# U 盘
update ota /udisk/update.img
# TF 卡
update ota /sdcard/update.img
# /userdata/
update ota /userdata/udpate.img
等待升级完成,升级成功后,设备会重新启动进入系统。
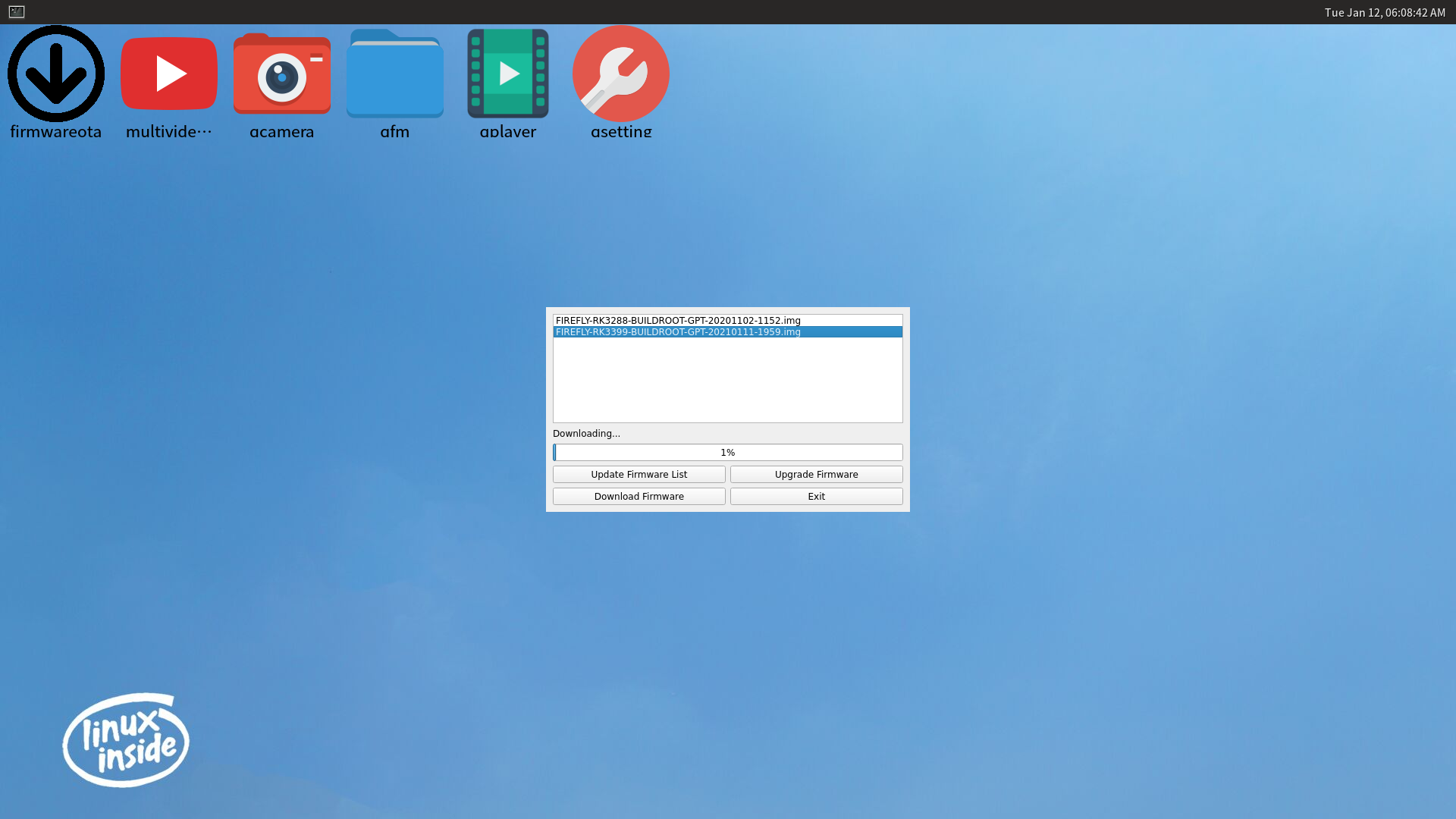
FirmwareOta¶
firmwareota 是一个 Qt 桌面应用,支持从网络下载固件进行固件升级,下面是使用说明。
添加桌面应用¶
下载
下载链接(提取码:1234)
解压
tar -zxvf firmwareota.tar.gz
按照目录结构,将文件拷贝到设备
└── usr
├── bin
│ └── firmwareota
└── share
├── applications
│ └── firmwareota.desktop
└── icon
└── icon_firmwareota.png
重启桌面
/etc/init.d/S50launcher stop
/etc/init.d/S50launcher start
启动
设置完成后,则可以在桌面启动应用。
设置下载地址¶
程序会通过默认的 Http 地址下载列表文件 ota_list,解析列表文件获取固件下载链接。
列表文件格式,例:
firmware_name_1
http://192.168.2.11:8000/firmware_name_1
firmware_name_2
http://192.168.2.11:8000/firmware_name_2
...
我们可以通过添加 /userdata/list_url 文件,设置指定列表文件下载地址,例:
http://192.168.2.11:8000/ota_list
Weston 配置¶
我们可以通过配置 Weston 对显示进行一些自定义设置,下文对部分设置进行说明。
状态栏设置¶
Weston 支持在 weston.ini 配置文件的 shell 段设置状态栏的背景色、位置,以及在 launcher 段设置快捷启动程序,如:
# /etc/xdg/weston/weston.ini
[shell]
# 颜色格式为 ARGB8888
panel-color=0xff002244
# top|bottom|left|right|none
panel-position=bottom
[launcher]
icon=/usr/share/weston/terminal.png
path=/usr/bin/weston-terminal
[launcher]
# 图标路径
icon=/usr/share/weston/icon_flower.png
# 快捷启动命令
path=/usr/bin/qsetting
背景设置¶
Weston 支持在 weston.ini 配置文件的 shell 段设置背景图案、颜色,如:
# /etc/xdg/weston/weston.ini
[shell]
# 背景图案(壁纸)绝对路径
background-image=/usr/share/weston/background.png
# scale|scale-crop|tile
background-type=scale
# 颜色格式为 ARGB8888,未设置背景图案时生效
background-color=0xff002244
待机及锁屏配置¶
Weston 的超时待机时长可以在启动参数中配置,也可以在 weston.ini 的 core 段配置,如:
# /etc/init.d/S50launcher
start)
...
# 0 为禁止待机,单位为秒
weston --tty=2 -B=drm-backend.so --idle-time=0&
或者:
# /etc/xdg/weston/weston.ini
[core]
# 设置 5 秒未操作后进入待机状态
idle-time=5
显示颜色格式配置¶
Buildroot SDK 内 Weston 目前默认显示格式为 ARGB8888,对于某些低性能平台,可以在 weston.ini 的 core 段配置为 RGB565,如:
# /etc/xdg/weston/weston.ini
[core]
# xrgb8888|rgb565|xrgb2101010
gbm-format=rgb565
也可以在 weston.ini 的 output 段单独配置每个屏幕的显示格式,如:
# /etc/xdg/weston/weston.ini
[output]
# output 的 name 可以查看 /sys/class/drm/card0-name
name=LVDS-1
# xrgb8888|rgb565|xrgb2101010
gbm-format=rgb565
屏幕方向设置¶
Weston 的屏幕显示方向可以在 weston.ini 的 output 段配置,如:
# /etc/xdg/weston/weston.ini
[output]
name=LVDS-1
# normal|90|180|270|flipped|flipped-90|flipped-180|flipped-270
transform=180
如果需要动态配置屏幕方向,可以通过动态配置文件,如:
echo "output:all:rotate90" > /tmp/.weston_drm.conf # 所有屏幕旋转 90 度
echo "output:eDP-1:rotate180" > /tmp/.weston_drm.conf # eDP-1 旋转 180 度
分辨率及缩放配置¶
Weston 的屏幕分辨率及缩放可以在 weston.ini 的 output 段配置,如:
# /etc/xdg/weston/weston.ini
[output]
name=HDMI-A-1
# 需为屏幕支持的有效分辨率
mode=1920x1080
# 需为整数倍数
scale=2
如果需要动态配置分辨率及缩放,可以通过动态配置文件,如:
echo "output:HDMI-A-1:mode=800x600" > /tmp/.weston_drm.conf # 修改 HDMI-A-1 分辨率为800x600
这种方式缩放时需要依赖 RGA 加速。
冻结屏幕¶
在启动 Weston 时,开机 logo 到 UI 显示之间存在短暂切换黑屏。如需要防止黑屏,可以通过以下种动态配置文件方式短暂冻结 Weston 屏幕内容:
# /etc/init.d/S50launcher
start)
...
export WESTON_FREEZE_DISPLAY=/tmp/.weston_freeze # 设置特殊配置文件路径
touch /tmp/.weston_freeze # 冻结显示
weston --tty=2 -B=drm-backend.so --idle-time=0&
...
sleep 1 && rm /tmp/.weston_freeze& # 1 秒后解冻
多屏配置¶
Buildroot SDK 的 Weston 支持多屏同异显及热拔插等功能,不同显示器屏幕的区分根据 drm 的 name (通过 /sys/class/drm/card0-name 获取),相关配置通过环境变量设置,如:
# /etc/init.d/S50launcher
start)
...
export WESTON_DRM_PRIMARY=HDMI-A-1 # 指定主显为 HDMI-A-1
export WESTON_DRM_MIRROR=1 # 使用镜像模式(多屏同显),不设置此环境变量即为异显
export WESTON_DRM_KEEP_RATIO=1 # 镜像模式下缩放保持纵横比,不设置此变量即为强制全屏
export WESTON_DRM_PREFER_EXTERNAL=1 # 外置显示器连接时自动关闭内置显示器
export WESTON_DRM_PREFER_EXTERNAL_DUAL=1 # 外置显示器连接时默认以第一个外显为主显
weston --tty=2 -B=drm-backend.so --idle-time=0&
镜像模式缩放显示内容时需要依赖 RGA 加速。
同时也支持在 weston.ini 的 output 段单独禁用指定屏幕:
# /etc/xdg/weston/weston.ini
[output]
name=LVDS-1
mode=off
# off|current|preferred|<WIDTHxHEIGHT@RATE>
输入设备相关配置¶
Weston 服务默认需要至少一个输入设备,如无输入设备,则需要在 weston.ini 中的 core 段特殊设置:
# /etc/xdg/weston/weston.ini
[core]
require-input=false