2. CAN 使用¶
2.1. CAN 简介¶
CAN(Controller Area Network)总线,即控制器局域网总线,是一种有效支持分布式控制或实时控制的串行通信网络。CAN总线是一种在汽车上广泛采用的总线协议,被设计作为汽车环境中的微控制器通讯。 如果想了解更多的内容可以参考CAN应用报告
2.3. DTS 节点配置¶
公共配置
kernel/arch/arm64/boot/dts/rockchip/rk3576.dtsican0: can@2ac00000 { compatible = "rockchip,rk3576-canfd"; reg = <0x0 0x2ac00000 0x0 0x1000>; interrupts = <GIC_SPI 121 IRQ_TYPE_LEVEL_HIGH>; clocks = <&cru CLK_CAN0>, <&cru HCLK_CAN0>; clock-names = "baudclk", "apb_pclk"; resets = <&cru SRST_CAN0>, <&cru SRST_H_CAN0>; reset-names = "can", "can-apb"; dmas = <&dmac0 20>; dma-names = "rx"; status = "disabled"; }; can1: can@2ac10000 { compatible = "rockchip,rk3576-canfd"; reg = <0x0 0x2ac10000 0x0 0x1000>; interrupts = <GIC_SPI 122 IRQ_TYPE_LEVEL_HIGH>; clocks = <&cru CLK_CAN1>, <&cru HCLK_CAN1>; clock-names = "baudclk", "apb_pclk"; resets = <&cru SRST_CAN1>, <&cru SRST_H_CAN1>; reset-names = "can", "can-apb"; dmas = <&dmac1 21>; dma-names = "rx"; status = "disabled"; };
板级配置
kernel/arch/arm64/boot/dts/rockchip/rk3576-firefly-aio-3576jd4.dtsi
&can0 {
status = "okay";
pinctrl-names = "default";
pinctrl-0 = <&can0m2_pins>;
};
另外可设置时钟频率 assigned-clock-rates,如果 CAN 的比特率低于等于 3M 建议修改 CAN 时钟到 100M,信号更稳定。高于 3M 比特率的,时钟设置 200M 就可以。
2.4. 通信测试¶
2.4.1. CAN 通信测试¶
使用 candump 和 cansend 工具进行收发报文测试即可,Ubuntu 系统可使用 apt update && apt install can-utils 安装。
Android 可以将工具 push 到 /system/bin/ 目录下执行。工具包含在 SDK 中,也可以在 官方 或者 github 下载。
#在收发端关闭can0设备
ip link set can0 down
#在收发端设置比特率为250Kbps
ip link set can0 type can bitrate 250000
#在收发端打开can0设备
ip link set can0 up
#在接收端执行candump,阻塞等待报文
candump can0
#在发送端执行cansend,发送报文
cansend can0 123#1122334455667788
2.5. 更多指令¶
1、 ip link set canX down //关闭can设备;
2、 ip link set canX up //开启can设备;
3、 ip -details link show canX //显示can设备详细信息;
4、 candump canX //接收can总线发来数据;
5、 ifconfig canX down //关闭can设备,以便配置;
6、 ip link set canX up type can bitrate 250000 //设置can波特率
7、 conconfig canX bitrate + 波特率;
8、 canconfig canX start //启动can设备;
9、 canconfig canX ctrlmode loopback on //回环测试;
10、canconfig canX restart // 重启can设备;
11、canconfig canX stop //停止can设备;
12、canecho canX //查看can设备总线状态;
13、cansend canX --identifier=ID+数据 //发送数据;
14、candump canX --filter=ID:mask //使用滤波器接收ID匹配的数据
2.6. FAQS¶
总结调试过程中遇到的几个问题及解决方法:
2.6.1. 报文发送后很久才接收到,或者接收不到。¶
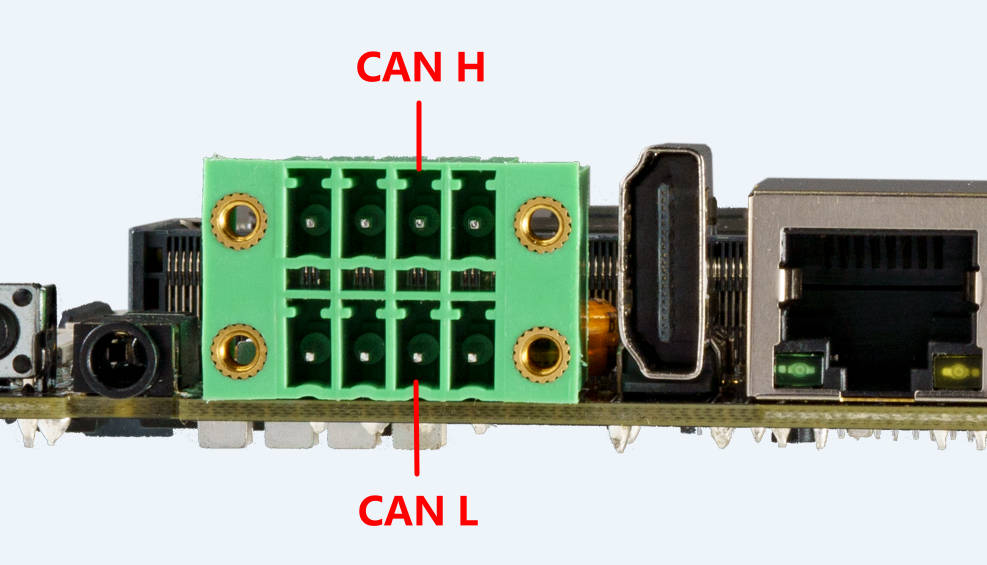
检查总线 CAN_H 和 CAN_L, 杜邦线是否松动或者接反。
2.6.2. CAN时钟频率配置¶
如果CAN的比特率低于等于3M建议修改CAN时钟到100M,信号更稳定。高于3M比特率的, 时钟设置200M就可以。
CAN时钟频率修改方法参考如下:
@@ -673,7 +673,7 @@
status = "disabled";
compatible = "rockchip,can-1.0";
assigned-clocks = <&cru CLK_CAN1>;
- assigned-clock-rates = <150000000>;
+ assigned-clock-rates = <100000000>;
pinctrl-names = "default";
pinctrl-0 = <&can1m1_pins>;
};
@@ -682,7 +682,7 @@
status = "disabled";
compatible = "rockchip,can-1.0";
assigned-clocks = <&cru CLK_CAN2>;
- assigned-clock-rates = <150000000>;
+ assigned-clock-rates = <100000000>;
pinctrl-names = "default";
pinctrl-0 = <&can2m0_pins>;
};
注意:
在某些时钟频率下,CAN的bitrate无法获得准确的速率,大家可以自行调整
assigned-clock-rates去解决。查看是否得到所需的bitrare:
ip -d link show can1