9. SPI 使用¶
9.2. SPI 工作方式¶
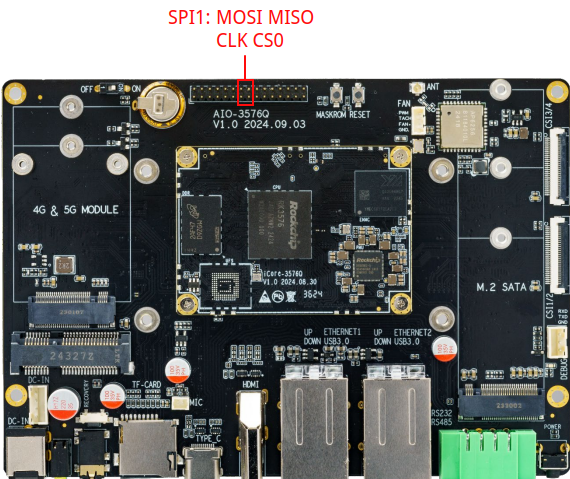
SPI 以主从方式工作,这种模式通常有一个主设备和一个或多个从设备,需要至少 4 根线,分别是:
CS 片选信号
SCLK 时钟信号
MOSI 主设备数据输出、从设备数据输入
MISO 主设备数据输入,从设备数据输出
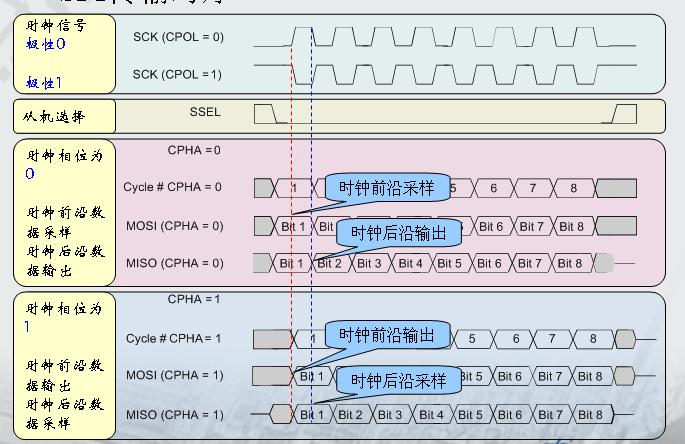
Linux 内核用 CPOL 和 CPHA 的组合来表示当前 SPI 的四种工作模式:
CPOL=0,CPHA=0 SPI_MODE_0
CPOL=0,CPHA=1 SPI_MODE_1
CPOL=1,CPHA=0 SPI_MODE_2
CPOL=1,CPHA=1 SPI_MODE_3
CPOL:表示时钟信号的初始电平的状态,0为低电平,1为高电平。
CPHA:表示在哪个时钟沿采样,0为第一个时钟沿采样,1为第二个时钟沿采样。
SPI 的四种工作模式波形图如下:
9.3. 接口使用¶
Linux 提供了一个功能有限的 SPI 用户接口,如果不需要用到 IRQ 或者其他内核驱动接口,可以考虑使用接口 spidev 编写用户层程序控制 SPI 设备。在 AIO-3576Q开发板中对应的路径为: /dev/spidev1.0
spidev 对应的驱动代码:kernel-5.10/drivers/spi/spidev.c
内核 config 需要选上 SPI_SPIDEV:
│ Symbol: SPI_SPIDEV [=y]
│ Type : tristate
│ Prompt: User mode SPI device driver support
│ Location:
│ -> Device Drivers
│ -> SPI support (SPI [=y])
│ Defined at drivers/spi/Kconfig:684
│ Depends on: SPI [=y] && SPI_MASTER [=y]
DTS 配置参考如下:
&spix {
status = "okay";
max-freq = <50000000>;
spidev1: spidev@00{
compatible = "rockchip,spidev";
status = "okay";
reg = <0x0>;
spi-max-frequency = <50000000>;
};
};
spidev的详细使用说明请参考文档kernel-5.10/Documentation/spi/spidev.rst