4. GPIO 使用¶
4.1. 简介¶
GPIO,全称 General-Purpose Input/Output(通用输入输出),是一种软件运行期间能够动态配置和控制的通用引脚。 所有的 GPIO 在上电后的初始状态都是输入模式,可以通过软件设为上拉或下拉,也可以设置为中断脚,驱动强度都是可编程的,其核心是填充 GPIO bank 的方法和参数,并调用 gpiochip_add 注册到内核中。
AIO-3576Q 开发板为了方便用户开发使用,引出了GPIO口供用户调试和开发,其对应引脚如下
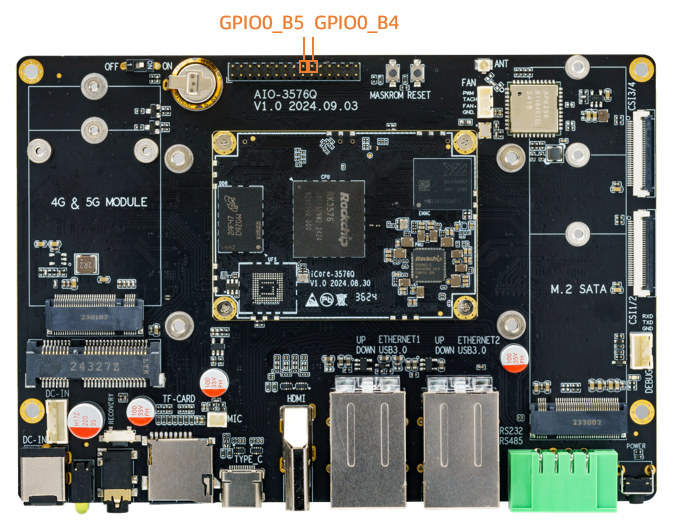
本文以 GPIO0_B4 , GPIO0_B5 这两个 GPIO 口为例写一份简单操作 GPIO 口的驱动,在 SDK 的路径为 kernel/drivers/gpio/gpio-firefly.c,以下就以该驱动为例介绍 GPIO 的操作。
4.2. GPIO引脚计算¶
iCore-3576Q 有 5 组 GPIO bank:GPIO0~GPIO4,每组又以 A0~A7, B0~B7, C0~C7, D0~D7 作为编号区分,常用以下公式计算引脚:
GPIO pin脚计算公式:pin = bank * 32 + number
GPIO 小组编号计算公式:number = group * 8 + X
下面演示GPIO0_B4 pin脚计算方法:
bank = 0; //GPIO0_B4 => 0, bank ∈ [0,4]
group = 1; //GPIO0_B1 => 1, group ∈ {(A=0), (B=1), (C=2), (D=3)}
X = 4; //GPIO0_B4 => 4, X ∈ [0,7]
number = group * 8 + X = 1 * 8 + 4 = 12
pin = bank*32 + number= 0 * 32 + 12 = 12;
GPIO0_B4 对应的设备树属性描述为:<&gpio0 12 GPIO_ACTIVE_HIGH>,由kernel/include/dt-bindings/pinctrl/rockchip.h的宏定义可知,也可以将GPIO0_B4描述为<&gpio0 RK_PB4 GPIO_ACTIVE_HIGH>。
#define RK_PA0 0
#define RK_PA1 1
#define RK_PA2 2
#define RK_PA3 3
#define RK_PA4 4
#define RK_PA5 5
#define RK_PA6 6
#define RK_PA7 7
#define RK_PB0 8
#define RK_PB1 9
#define RK_PB2 10
#define RK_PB3 11
...
当GPIO0_B4 脚没有被其它外设复用时, 我们可以通过export导出该引脚去使用
:/ # ls /sys/class/gpio/
export gpiochip128 gpiochip509 gpiochip96
gpiochip0 gpiochip32 gpiochip64 unexport
:/ # echo 12 > /sys/class/gpio/export
:/ # ls /sys/class/gpio/gpio12
active_low device direction edge power subsystem uevent value
:/ # cat /sys/class/gpio/gpio12/direction
in
:/ # cat /sys/class/gpio/gpio12/value
0
4.3. 输入输出¶
首先在 DTS 文件中增加驱动的资源描述:
kernel/arch/arm64/boot/dts/rockchip/rk3576-firefly-demo.dtsi
/{
gpio_demo: gpio_demo{
compatible = "firefly,rk3576-gpio";
status = "okay";
pinctrl-names = "default";
pinctrl-0 = <&pin12_13_gpio>;
firefly-gpio = <&gpio0 RK_PB4 GPIO_ACTIVE_HIGH>; /*GPIO0_B4*/
firefly-irq-gpio = <&gpio0 RK_PB5 IRQ_TYPE_EDGE_RISING>; /*GPIO0_B5*/
};
};
&pinctrl {
gpio{
pin12_13_gpio: pin12_13_gpio{
rockchip,pins =
<0 RK_PB4 0 &pcfg_pull_none>,
<0 RK_PB5 0 &pcfg_pull_none>;
};
};
};
这里定义了一个脚作为一般的输出输入口:
firefly-gpio GPIO0_B4
GPIO_ACTIVE_HIGH 表示高电平有效,如果想要低电平有效,可以改为:GPIO_ACTIVE_LOW,这个属性将被驱动所读取。
然后在 probe 函数中对 DTS 所添加的资源进行解析,代码如下:
static int firefly_gpio_probe(struct platform_device *pdev)
{
int ret;
int gpio;
enum of_gpio_flags flag;
struct firefly_gpio_info *gpio_info;
struct device_node *firefly_gpio_node = pdev->dev.of_node;
printk("Firefly GPIO Test Program Probe\n");
gpio_info = devm_kzalloc(&pdev->dev,sizeof(struct firefly_gpio_info *), GFP_KERNEL);
if (!gpio_info) {
return -ENOMEM;
}
gpio = of_get_named_gpio_flags(firefly_gpio_node, "firefly-gpio", 0, &flag);
if (!gpio_is_valid(gpio)) {
printk("firefly-gpio: %d is invalid\n", gpio); return -ENODEV;
}
if (gpio_request(gpio, "firefly-gpio")) {
printk("gpio %d request failed!\n", gpio);
gpio_free(gpio);
return -ENODEV;
}
gpio_info->firefly_gpio = gpio;
gpio_info->gpio_enable_value = (flag == OF_GPIO_ACTIVE_LOW) ? 0:1;
gpio_direction_output(gpio_info->firefly_gpio, gpio_info->gpio_enable_value);
printk("Firefly gpio putout finish \n");
...
}
of_get_named_gpio_flags 从设备树中读取 firefly-gpio 和 firefly-irq-gpio 的 GPIO 配置编号和标志,gpio_is_valid 判断该 GPIO 编号是否有效,gpio_request 则申请占用该 GPIO。如果初始化过程出错,需要调用 gpio_free 来释放之前申请过且成功的 GPIO 。在驱动中调用 gpio_direction_output 就可以设置输出高还是低电平,这里默认输出从 DTS 获取得到的有效电平 GPIO_ACTIVE_HIGH,即为高电平,如果驱动正常工作,可以用万用表测得对应的引脚应该为高电平。实际中如果要读出 GPIO,需要先设置成输入模式,然后再读取值:
int val;
gpio_direction_input(your_gpio);
val = gpio_get_value(your_gpio);
下面是常用的 GPIO API 定义:
#include <linux/gpio.h>
#include <linux/of_gpio.h>
enum of_gpio_flags {
OF_GPIO_ACTIVE_LOW = 0x1,
};
int of_get_named_gpio_flags(struct device_node *np, const char *propname,
int index, enum of_gpio_flags *flags);
int gpio_is_valid(int gpio);
int gpio_request(unsigned gpio, const char *label);
void gpio_free(unsigned gpio);
int gpio_direction_input(int gpio);
int gpio_direction_output(int gpio, int v);
4.4. 中断¶
在 Firefly 的例子程序中还包含了一个中断引脚,GPIO 口的中断使用与 GPIO 的输入输出类似,首先在 DTS 文件中增加驱动的资源描述:
kernel/arch/arm64/boot/dts/rockchip/rk3576-firefly-demo.dtsi
gpio {
compatible = "firefly-gpio";
firefly-irq-gpio = <&gpio0 RK_PB5 IRQ_TYPE_EDGE_RISING>; /*GPIO0_B5*/
};
IRQ_TYPE_EDGE_RISING 表示中断由上升沿触发,当该引脚接收到上升沿信号时可以触发中断函数。 这里还可以配置成如下:
IRQ_TYPE_NONE //默认值,无定义中断触发类型
IRQ_TYPE_EDGE_RISING //上升沿触发
IRQ_TYPE_EDGE_FALLING //下降沿触发
IRQ_TYPE_EDGE_BOTH //上升沿和下降沿都触发
IRQ_TYPE_LEVEL_HIGH //高电平触发
IRQ_TYPE_LEVEL_LOW //低电平触发
然后在 probe 函数中对 DTS 所添加的资源进行解析,再做中断的注册申请,代码如下:
static int firefly_gpio_probe(struct platform_device *pdev)
{
int ret;
int gpio;
enum of_gpio_flags flag;
struct firefly_gpio_info *gpio_info;
struct device_node *firefly_gpio_node = pdev->dev.of_node;
...
gpio_info->firefly_irq_gpio = gpio;
gpio_info->firefly_irq_mode = flag;
gpio_info->firefly_irq = gpio_to_irq(gpio_info->firefly_irq_gpio);
if (gpio_info->firefly_irq)
{
if (gpio_request(gpio, "firefly-irq-gpio"))
{
dev_err(&pdev->dev, "firefly-irq-gpio: %d request failed!\n", gpio);
gpio_free(gpio);
return IRQ_NONE;
}
ret = request_irq(gpio_info->firefly_irq, firefly_gpio_irq,
flag, "firefly-gpio", gpio_info);
if (ret != 0)
{
free_irq(gpio_info->firefly_irq, gpio_info);
dev_err(&pdev->dev, "Failed to request IRQ: %d\n", ret);
}
}
printk("Firefly irq gpio finish \n");
return 0;
}
static irqreturn_t firefly_gpio_irq(int irq, void *dev_id) //中断函数
{
printk("Enter firefly gpio irq test program!\n");
return IRQ_HANDLED;
}
调用 gpio_to_irq 把 GPIO 的 PIN 值转换为相应的 IRQ 值,调用 gpio_request 申请占用该 IO 口,调用 request_irq 申请中断,如果失败要调用 free_irq 释放,该函数中 gpio_info-firefly_irq 是要申请的硬件中断号,firefly_gpio_irq 是中断函数,gpio_info->firefly_irq_mode 是中断处理的属性,firefly-gpio 是设备驱动程序名称,gpio_info 是该设备的 device 结构,在注册共享中断时会用到。
4.5. 复用¶
该案例仅供参考,最终以实际硬件接口为准
GPIO 口除了通用输入输出、中断功能外,还可能有其它复用功能,以GPIO0_C1为例,就有如下几个功能:
| func0 | func1 | func2 | func3 |
|---|---|---|---|
| GPIO0_C1 | UART8_TX_M2 | I2C0_SCL_M1 | I3C0_SCL_M0 |
查看 /d/pinctrl/pinctrl-rockchip-pinctrl/pinmux-pins,查看各个引脚的作用,如果发现GPIO0_C1被复用为I2c,则在dts中关闭它
&i2c0 {
status = "disabled";
};
gpio_demo: gpio_demo {
status = "okay";
compatible = "firefly,rk3576-gpio";
firefly-gpio = <&gpio0 RK_PC1 GPIO_ACTIVE_HIGH>; /* GPIO0_C1 */
};
Note: 此处 GPIO0_C1 仅作示例,实际使用中不推荐如此修改
上面介绍了在DTS上修改,那在运行时又如何切换功能呢?下面以 I2C0_M1 为例作简单的介绍,详细介绍可以参考RKDocs/common/PIN-Ctrl/Rockchip-Developer-Guide-Linux-Pin-Ctrl-CN.pdf。
查规格表可知,I2C0_SCL_M1 与 I2C0_SDA_M1 的功能定义如下:
| Pad# | func0 | func1 | func2 |
|---|---|---|---|
| GPIO0_C1 | UART8_TX_M2 | I2C0_SCL_M1 | I3C0_SCL_M0 |
| GPIO0_C2 | UART8_RX_M2 | I2C0_SDA_M1 | I3C0_SDA_M0 |
在 kernel/arch/arm64/boot/dts/rockchip/rk3576.dtsi 里有:
i2c0: i2c@27300000 {
compatible = "rockchip,rk3576-i2c", "rockchip,rk3399-i2c";
reg = <0x0 0x27300000 0x0 0x1000>;
clocks = <&cru 502>, <&cru 501>;
clock-names = "i2c", "pclk";
interrupts = <0 88 4>;
pinctrl-names = "default";
pinctrl-0 = <&i2c0m0_xfer>;
resets = <&cru 524371>, <&cru 524369>;
reset-names = "i2c", "apb";
#address-cells = <1>;
#size-cells = <0>;
status = "disabled";
};
跟复用控制相关的是 pinctrl- 开头的属性:
pinctrl-names 定义了状态名称列表: default (i2c 功能) 和 gpio 两种状态。
pinctrl-0 定义了状态 0 (即 default)时需要设置的 pinctrl: &i2c0m0_xfer
pinctrl-1 定义了状态 1 (即 gpio)时需要设置的 pinctrl: &i2c0m1_gpio
这些 pinctrl 在 kernel/arch/arm64/boot/dts/rockchip/rk3576.dtsi 中这样定义:
pinctrl: pinctrl {
compatible = "rockchip,rk3576-pinctrl";
rockchip,grf = <&ioc_grf>;
rockchip,sys-grf = <&sys_grf>;
#address-cells = <2>;
#size-cells = <2>;
...
};
在kernel/arch/arm64/boot/dts/rockchip/rk3576-pinctrl.dtsi中有i2c0的定义
i2c0m1_xfer: i2c0m1-xfer {
rockchip,pins =
<0 17 9 &pcfg_pull_none_smt>,
<0 18 9 &pcfg_pull_none_smt>;
};
RK_FUNC_GPIO 的定义在 kernel/include/dt-bindings/pinctrl/rockchip.h ,此处简写作0:
#define RK_FUNC_GPIO 0
知道了上面关于i2c0的定义后,在 kernel/arch/arm64/boot/dts/rockchip/rk3576-firefly-demo.dtsi 中为i2c7节点添加gpio的资源
&i2c0 {
status = "okay";
pinctrl-names = "default","i2c0_gpio";
pinctrl-1 = <&i2c0m1_gpio>;
gpios = <&gpio0 RK_PC1 GPIO_ACTIVE_HIGH>,<&gpio0 RK_PC2 GPIO_ACTIVE_HIGH>;
};
&pinctrl {
i2c0{
/omit-if-no-ref/
i2c0m1_gpio: i2c0m1-gpio{
rockchip,pins =
/* i2c0_gpio0_c1 */
<0 RK_PC1 0 &pcfg_pull_none>,
/* i2c0_gpio0_c2 */
<0 RK_PC2 0 &pcfg_pull_none>;
};
};
};
i2c驱动注册流程如下:
rk3x_i2c_driver_init
platform_driver_register
driver_register
bus_add_driver
driver_attach
bus_for_each_dev
__driver_attach
device_driver_attach
driver_probe_device
really_probe
pinctrl_bind_pins
pinctrl_select_state
pinctrl_select_state是选择pinctrl的函数,它用来选择我们dts中设置的pinctrl。
4.6. 调试方法¶
4.6.1. GPIO 调试接口¶
Debugfs 文件系统目的是为开发人员提供更多内核数据,方便调试。 这里 GPIO 的调试也可以用 Debugfs 文件系统,获得更多的内核信息。GPIO 在 Debugfs 文件系统中的接口为 /sys/kernel/debug/gpio,可以这样读取该接口的信息:
console:/ $ cat sys/kernel/debug/gpio
gpiochip0: GPIOs 0-31, parent: platform/fd8a0000.gpio, gpio0:
gpio-0 ( |bt_default_wake_host) in lo
gpio-21 ( |bt_default_wake ) in lo
gpio-22 ( |bt_default_reset ) out lo
gpiochip1: GPIOs 32-63, parent: platform/fec20000.gpio, gpio1:
gpio-34 ( |bt_default_rts ) in hi
gpio-36 ( |hpd ) in lo
gpio-43 ( |:power ) out hi
gpio-44 ( |reset ) out hi
gpio-52 ( |hp-det ) in hi ACTIVE LOW
gpio-56 ( |firefly-gpio ) out hi
gpio-57 ( |firefly-irq-gpio ) in hi
gpio-61 ( |hdmirx-det ) in hi ACTIVE LOW
...
从读取到的信息中可以知道,内核把 GPIO 当前的状态都列出来了,以 GPIO1 组为例,gpio-56(GPIO1_D0) 输出高电平 (out hi)。
4.6.2. 查看 pinmux-pins¶
使用命令
:/ # cat /d/pinctrl/pinctrl-rockchip-pinctrl/pinmux-pins
得到结果
Pinmux settings per pin
Format: pin (name): mux_owner gpio_owner hog?
pin 0 (gpio0-0): wireless-bluetooth gpio0:0 function wireless-bluetooth group bt-irq-gpio
pin 1 (gpio0-1): (MUX UNCLAIMED) (GPIO UNCLAIMED)
pin 2 (gpio0-2): (MUX UNCLAIMED) (GPIO UNCLAIMED)
pin 3 (gpio0-3): (MUX UNCLAIMED) (GPIO UNCLAIMED)
pin 4 (gpio0-4): fe2c0000.mmc (GPIO UNCLAIMED) function sdmmc group sdmmc-det
...
解析:
pin 0这一列表示引脚编号,gpio0-0这一列表示gpio组编号,后面MUX UNCLAIMED这一列表示数据选择器的拥有者,GPIO UNCLAIMED这一列表示gpio的拥有者。
其中 MUX UNCLAIMED 表示该引脚还没有被节点使用pinctrl去进行控制,例如:节点 i2c7 被启用,它拥有pinctrl-0属性,对引脚pin 56功能作出出修改,复用为i2c ,则该引脚的信息会变为pin 56 (gpio1-24): fec90000.i2c (GPIO UNCLAIMED) function i2c7 group i2c7m0-xfer ,它被地址为0xfec90000、名字为i2c的节点使用pinctrl配置,pinctrl的值是i2cm0-xfer。
GPIO UNCLAIMED表示还没有注册的gpio使用该引脚,我们用上述gpio_demo例子去注册该引脚,引脚信息会变成pin 56 (gpio1-24): gpio_demo gpio1:56 function gpio group pin56_57_gpio ,它被名为gpio_demo的节点使用pinctrl配置,pinctrl的值是pin56_57_gpio,该引脚还被申请为gpio。
4.7. FAQs¶
4.7.1. Q1: 如何将 PIN 的 MUX 值切换为一般的 GPIO?¶
A1: 当使用 GPIO request 时候,会将该 PIN 的 MUX 值强制切换为 GPIO,所以使用该 PIN 脚为 GPIO 功能的时候确保该 PIN 脚没有被其他模块所使用。
4.7.2. Q2: 为什么我用 IO 指令读出来的值都是 0x00000000?¶
A2: 如果用 IO 命令读某个 GPIO 的寄存器,读出来的值异常,如 0x00000000 或 0xffffffff 等,请确认该 GPIO 的 CLK 是不是被关了,GPIO 的 CLK 是由 CRU 控制,可以通过读取 datasheet 下面 CRU_CLKGATE_CON* 寄存器来查到 CLK 是否开启,如果没有开启可以用 io 命令设置对应的寄存器,从而打开对应的 CLK,打开 CLK 之后应该就可以读到正确的寄存器值了。
4.7.3. Q3: 测量到 PIN 脚的电压不对应该怎么查?¶
A3: 测量该 PIN 脚的电压不对时,如果排除了外部因素,可以确认下该 PIN 所在的 IO 电压源是否正确,以及 IO-Domain 配置是否正确。
4.7.4. Q4: gpio_set_value() 与 gpio_direction_output() 有什么区别?¶
A4: 如果使用该 GPIO 时,不会动态的切换输入输出,建议在开始时就设置好 GPIO 输出方向,后面拉高拉低时使用 gpio_set_value() 接口,而不建议使用 gpio_direction_output(), 因为 gpio_direction_output 接口里面有 mutex 锁,对中断上下文调用会有错误异常,且相比 gpio_set_value,gpio_direction_output 所做事情更多,浪费。