1. 编译 Linux 固件¶
1.1. 获取 SDK¶
首先准备一个空文件夹用于存放 SDK,建议在 home 目录下,本文以~/proj为例
注意:
1. SDK 采用交叉编译,所以要在 X86_64 电脑上使用 SDK,不要将 SDK 下载到板子上
2. 编译环境请使用 Ubuntu18.04(真机或 docker 容器),如果使用其他版本可能导致编译出错
3. 不要在虚拟机共享文件夹以及非英文目录存放、解压SDK
4. 获取、编译 SDK 请全程使用普通用户,不允许也不需要使用 root 权限(除非需要 apt 安装软件)
非常重要:
开发前请根据 WIKI 把 SDK 更新到最新,尤其是使用 CS-R1 集群服务器用户(使用 CS-R1 用户如果代码版本太旧软件电平配置和硬件不匹配可能导致硬件损坏)。
CORE-1126-JD4/CORE-1109-JD4 系列请下载 rv1126_rv1109_linux_release Linux SDK 软件包。
CORE-1126-JD4/CORE-1109-JD4 系列如果要进行 uvc 应用的开发,请下载 rv1126_rv1109_linux_ai_camera_release Linux SDK 软件包。
1.1.1. SDK 开发包说明¶
rv1126_rv1109_linux_release SDK 说明:
CORE-1126-JD4/CORE-1109-JD4系列产品可开发 IPC 固件(IPC 即网络摄像头)CAM-C1126S2U/CAM-C1109S2U系列产品可开发 Facial_gate 固件(Facial_gate 即人脸识别闸机)
rv1126_rv1109_linux_ai_camera_release SDK 说明:
CORE-1126-JD4/CORE-1109-JD4系列产品可开发 AI_UVC 固件(UVC 即免驱摄像头)CAM-C1126S2U/CAM-C1109S2U系列产品可开发 AI_UVC 固件(UVC 即免驱摄像头)
完整 SDK 和 BSP SDK 说明:
rv1126_rv1109_linux_release 和 rv1126_rv1109_linux_ai_camera_release 都是完整 SDK 。
rv1126_rv1109_linux_bsp_release 和 rv1126_rv1109_linux_ai_camera_bsp_release 都是 BSP SDK 。
完整 SDK 和 BSP SDK 的区别:
完整 SDK 可以编译出 buildroot 系统。文件体积比较大。里面包含 rockchip 提供的硬件加速文件目录。第一次使用建议拉取完整 SDK 。
BSP SDK 无法编译出 buildroot 系统。但是文件体积比较小。提供给只需要在公版固件的基础上,更新 u-boot 和 kernel 等分区固件的客户。
完整 SDK 和 BSP SDK 的相同点:
都可以编译打包 Debian10 固件。
1.1.3. 初始化仓库¶
方法一(推荐国内用户使用)
SDK 源码存放于 gitlab,国内用户可能下载完整的 SDK 仓库速度比较慢,所以我们提供了一个 SDK 基础包(Linux SDK),国内用户只需要在此基础包上同步 gitlab 上的代码就可以了
注:该方法只能获取到完整 SDK 。BSP SDK 需要使用方法二获取。
rv1126_rv1109_linux_releaseSDK 下载
下载完成后先验证一下 MD5 码:
md5sum rv1126_rv1109_linux_release_20211022.tgz
596c6bc6bb3095aea97d54c9df4cf333
确认无误后,就可以解压:
# 解压
mkdir -p ~/proj/rv1126_sdk
cd ~/proj/rv1126_sdk
mv /path/to/rv1126_rv1109_linux_release_20211022.tgz ./
tar xvf rv1126_rv1109_linux_release_20211022.tgz
#本压缩包内包含一个.repo目录,解压之后,在当前目录下执行以下操作
.repo/repo/repo sync -l
.repo/repo/repo sync -c --no-tags
.repo/repo/repo start firefly --all
#后续可以使用以下命令更新SDK
.repo/repo/repo sync -c --no-tags
#因为网络环境等原因,`.repo/repo/repo sync -c --no-tags` 命令更新代码可能会失败,可多次反复执行
rv1126_rv1109_linux_ai_camera_releaseSDK 下载
下载完成后先验证一下 MD5 码:
md5sum rv1126_rv1109_linux_ai_camera_release_20210306.tgz
26fcb17ddd82a43d396eb3eac4b7479f
确认无误后,就可以解压:
# 解压
mkdir -p ~/proj/rv1126_sdk_ai
cd ~/proj/rv1126_sdk_ai
mv /path/to/rv1126_rv1109_linux_ai_camera_release_20210306.tgz ./
tar xvf rv1126_rv1109_linux_ai_camera_release_20210306.tgz
#本压缩包内包含一个.repo目录,解压之后,在当前目录下执行以下操作
.repo/repo/repo sync -l
.repo/repo/repo sync -c --no-tags
.repo/repo/repo start firefly --all
#后续可以使用以下命令更新SDK
.repo/repo/repo sync -c --no-tags
#因为网络环境等原因,`.repo/repo/repo sync -c --no-tags` 命令更新代码可能会失败,可多次反复执行
方法二
通过 repo 拉取代码,此方法对网络要求较高,有条件可以使用。可选择获取完整 SDK 或者 BSP SDK 。
rv1126_rv1109_linux_release完整 SDK 拉取方法
mkdir ~/proj/rv1126_sdk/
cd ~/proj/rv1126_sdk/
repo init --no-clone-bundle --repo-url https://gitlab.com/firefly-linux/git-repo.git --no-repo-verify -u https://gitlab.com/firefly-linux/manifests.git -b master -m rv1126_rv1109_linux_release.xml
repo sync -c
#需反复确认代码下载是否成功
rv1126_rv1109_linux_bsp_releaseBSP SDK 拉取方法
mkdir ~/proj/rv1126_sdk/
cd ~/proj/rv1126_sdk/
repo init --no-clone-bundle --repo-url https://gitlab.com/firefly-linux/git-repo.git --no-repo-verify -u https://gitlab.com/firefly-linux/manifests.git -b master -m rv1126_rv1109_linux_bsp_release.xml
repo sync -c
#需反复确认代码下载是否成功
rv1126_rv1109_linux_ai_camera_release完整 SDK 拉取方法
mkdir ~/proj/rv1126_sdk_ai/
cd ~/proj/rv1126_sdk_ai/
repo init --no-clone-bundle --repo-url https://gitlab.com/firefly-linux/git-repo.git --no-repo-verify -u https://gitlab.com/firefly-linux/manifests.git -b master -m rv1126_rv1109_linux_ai_camera_release.xml
repo sync -c
#需反复确认代码下载是否成功
rv1126_rv1109_linux_ai_camera_bsp_releaseBSP SDK 拉取方法
mkdir ~/proj/rv1126_sdk_ai/
cd ~/proj/rv1126_sdk_ai/
repo init --no-clone-bundle --repo-url https://gitlab.com/firefly-linux/git-repo.git --no-repo-verify -u https://gitlab.com/firefly-linux/manifests.git -b master -m rv1126_rv1109_linux_ai_camera_bsp_release.xml
repo sync -c
#需反复确认代码下载是否成功
注:默认 repo 工具是使用 python2 来拉取代码。如果 Linux PC 系统比较新,可能默认的是 python3 版本。如果代码无法拉取,请手动设置一下 Linux PC 系统的 python 版本为 python2。并且使用当前目录下的 .repo/repo/repo 工具进行代码拉取。查看 Linux PC 系统默认的 python 版本:
$ ls -l /usr/bin/python
lrwxrwxrwx 1 root root 9 4月 16 2018 /usr/bin/python -> python2.7*
1.1.4. 同步代码¶
执行如下命令同步代码:
进入 rv1126_rv1109_linux_release SDK 根目录
cd ~/proj/rv1126_sdk
进入 rv1126_rv1109_linux_ai_camera_release SDK 根目录
cd ~/proj/rv1126_sdk_ai
同步命令
.repo/repo/repo sync -c --no-tags
.repo/repo/repo start firefly --all
后续可以使用以下命令更新 SDK:
.repo/repo/repo sync -c --no-tags
因为网络环境等原因,.repo/repo/repo sync -c --no-tags 命令更新代码可能会失败,可多次反复执行。
1.2. Linux SDK 配置介绍¶
1.2.1. 目录介绍¶
$ tree -L 1
.
├── app
├── buildroot # Buildroot 根文件系统编译目录
├── build.sh -> device/rockchip/common/build.sh # 编译脚本
├── device # 编译相关配置文件
├── docs # 文档
├── envsetup.sh -> buildroot/build/envsetup.sh
├── external
├── kernel
├── Makefile -> buildroot/build/Makefile
├── mkfirmware.sh -> device/rockchip/common/mkfirmware.sh # 链接脚本
├── prebuilts # 交叉编译工具链
├── rkbin
├── rkflash.sh -> device/rockchip/common/rkflash.sh # 烧写脚本
├── tools # 工具目录
├── u-boot
1.2.2. 配置文件介绍¶
在 device/rockchip/rv1126_rv1109/ 目录下,有不同板型的配置文件(xxxx.mk),用于管理 SDK 每个环节的编译配置,相关配置介绍:
# Target arch
export RK_ARCH=arm # 32 位 ARM 架构
# Uboot defconfig
export RK_UBOOT_DEFCONFIG=xxxx_defconfig # u-boot 配置文件
# Kernel defconfig
export RK_KERNEL_DEFCONFIG=xxxx_defconfig # kernel 配置文件
# Kernel defconfig fragment
export RK_KERNEL_DEFCONFIG_FRAGMENT=xxxx.config # kernel 配置文件(fragment)
# Kernel dts
export RK_KERNEL_DTS=xxxx.dts # dts 文件
# parameter for GPT table
export RK_PARAMETER=parameter-xxxx.txt # 分区表
# rootfs image path
export RK_ROOTFS_IMG=ubuntu_rootfs/rootfs.img # 根文件系统路径
1.2.3. 分区说明¶
1.2.3.1. parameter 分区表¶
parameter.txt 文件中包含了固件的分区信息,以 parameter-ubuntu-fit.txt 为例:
路径:device/rockchip/rv1126_rv1109/parameter-xxxxxx-fit.txt
FIRMWARE_VER: 8.1
MACHINE_MODEL: RV1126
MACHINE_ID: 007
MANUFACTURER: RV1126
MAGIC: 0x5041524B
ATAG: 0x00200800
MACHINE: 0xffffffff
CHECK_MASK: 0x80
PWR_HLD: 0,0,A,0,1
TYPE: GPT
CMDLINE: mtdparts=rk29xxnand:0x00002000@0x00004000(uboot),0x00002000@0x00006000(misc),0x00010000@0x00008000(boot),0x00010000@0x00018000(recovery),0x00010000@0x00028000(backup),0x00300000@0x00038000(rootfs),0x00060000@0x00338000(oem),0x00400000@0x00398000(userdata),-@0x00798000(media:grow)
uuid:rootfs=614e0000-0000-4b53-8000-1d28000054a9
CMDLINE 属性是我们关注的地方,以 uboot 为例, 0x00002000@0x00004000(uboot) 中 0x00004000 为uboot 分区的起始位置,0x00002000 为分区的大小,以此类推。
1.2.3.2. package-file¶
package-file 文件用于打包固件时确定需要的分区镜像和镜像路径,同时它需要与 parameter.txt 文件保持一致。
路径:tools/linux/Linux_Pack_Firmware/rockdev/rv1126_rv1109-package-file
# NAME Relative path
#
#HWDEF HWDEF
package-file package-file
bootloader Image/MiniLoaderAll.bin
parameter Image/parameter.txt
#
# if uboot.img is fit, uboot.img had include uboot and trust,
# so ignore trust.img
# file Image/uboot.img
# Image/uboot.img: Device Tree Blob version 17
#
# trust Image/trust.img
#
uboot Image/uboot.img
misc Image/misc.img
#resource Image/resource.img
#kernel Image/kernel.img
boot Image/boot.img
recovery Image/recovery.img
rootfs Image/rootfs.img
oem Image/oem.img
userdata Image/userdata.img
# 要写入backup分区的文件就是自身(update.img)
# SELF 是关键字,表示升级文件(update.img)自身
# 在生成升级文件时,不加入SELF文件的内容,但在头部信息中有记录
# 在解包升级文件时,不解包SELF文件的内容。
backup RESERVED
#update-script update-script
#recover-script recover-script
1.3. 编译 Debian 固件¶
本章介绍 Debian 固件的编译流程,推荐在 Ubuntu 18.04 系统环境下进行开发,若使用其它系统版本,可能需要对编译环境做相应调整。
本教程的编译部分适用于 v2.2.5f 以上 SDK 版本
$ realpath .repo/manifest.xml
/home/lvsx/project/rv1126_rv1109/.repo/manifests/rv1126_rv1109/rv1126_rv1109_linux_release_20240117_v2.2.5f.xml
1.3.1. 准备工作¶
1.3.1.1. 搭建编译环境¶
sudo apt-get install repo git ssh make gcc libssl-dev liblz4-tool \
expect g++ patchelf chrpath gawk texinfo chrpath diffstat binfmt-support \
qemu-user-static live-build bison flex fakeroot cmake gcc-multilib g++-multilib \
unzip \
device-tree-compiler ncurses-dev \
1.3.2. 编译 SDK¶
1.3.2.1. 编译前配置¶
在 device/rockchip/rv1126_rv1109/ 目录下,有不同板型的配置文件,选择配置文件:
1.3.2.2. 编译 Debian 固件¶
编译 V2 mipi 屏幕前配置(旧版本屏幕,该屏幕已停产)
./build.sh aio-rv1126-jd4-BE-45-debian.mk
编译 V3 mipi 屏幕前配置
./build.sh aio-rv1126-jd4-mipi101-BSD1218-A101KL68-debian.mk
1.3.2.3. 编译¶
1.3.2.3.1. 全自动编译¶
下载根文件系统:Debian 根文件系统(32位),放到 SDK 路径下
7z x debian10_rootfs_2022_12_22.7z
mkdir ubuntu_rootfs
mv rootfs.img ubuntu_rootfs/rootfs.img
开始编译
./build.sh
生成的完整固件会保存到 rockdev/pack/ 目录。
1.3.2.3.2. 部分编译¶
编译 u-boot
./build.sh uboot
编译 kernel
./build.sh kernel
编译 recovery
./build.sh recovery
下载根文件系统:Debian 根文件系统(32位),放到 SDK 路径下
7z x debian10_rootfs_2022_12_22.7z
mkdir ubuntu_rootfs
mv rootfs.img ubuntu_rootfs/rootfs.img
更新各部分镜像链接到
rockdev/目录:
./mkfirmware.sh
打包固件,生成的完整固件会保存到
rockdev/pack/目录。
./build.sh updateimg
1.4. 编译 Buildroot 固件¶
本章介绍 Buildroot 固件的编译流程,推荐在 Ubuntu 18.04 系统环境下进行开发,若使用其它系统版本,可能需要对编译环境做相应调整。
本教程的编译部分适用于 v2.2.5f 以上 SDK 版本
$ realpath .repo/manifest.xml
/home/lvsx/project/rv1126_rv1109/.repo/manifests/rv1126_rv1109/rv1126_rv1109_linux_release_20240117_v2.2.5f.xml
1.4.1. 准备工作¶
1.4.1.1. 搭建编译环境¶
sudo apt-get install repo git ssh make gcc libssl-dev liblz4-tool \
expect g++ patchelf chrpath gawk texinfo chrpath diffstat binfmt-support \
qemu-user-static live-build bison flex fakeroot cmake gcc-multilib g++-multilib \
unzip \
device-tree-compiler ncurses-dev \
1.4.2. 编译 SDK¶
1.4.2.1. 编译前配置¶
在 device/rockchip/rv1126_rv1109/ 目录下,有不同板型的配置文件。
rv1126_rv1109_linux_release SDK 和 rv1126_rv1109_linux_bsp_release SDK 选择配置文件:
# V2 MIPI 屏幕(老版本屏幕,该屏幕已停产)
./build.sh aio-rv1126-jd4-BE-45.mk
# V3 MIPI 屏幕
./build.sh aio-rv1126-jd4-mipi101-BSD1218-A101KL68.mk
rv1126_rv1109_linux_ai_camera_release SDK 和 rv1126_rv1109_linux_ai_camera_bsp_release SDK 选择配置文件:
CORE-1126-JD4/CORE-1109-JD4 系列产品对 UVC 功能适配并不太好,请有能力的客户再选择这个配置文件来编译。
./build.sh aio-rv1126-uvcc.mk
1.5. 编译 Thunder-boot 固件¶
目前 CORE-1126-JD4 最新的 SDK 已适配快速启动。编译快速启动固件选项:
# 编译 CORE-1126-JD4 V1.1 快速启动固件 适配的屏幕为 DM-M10R800 V2 屏幕模组
./build.sh device/rockchip/rv1126_rv1109/aio-rv1126-jd4-BE-45-tb-v11.mk
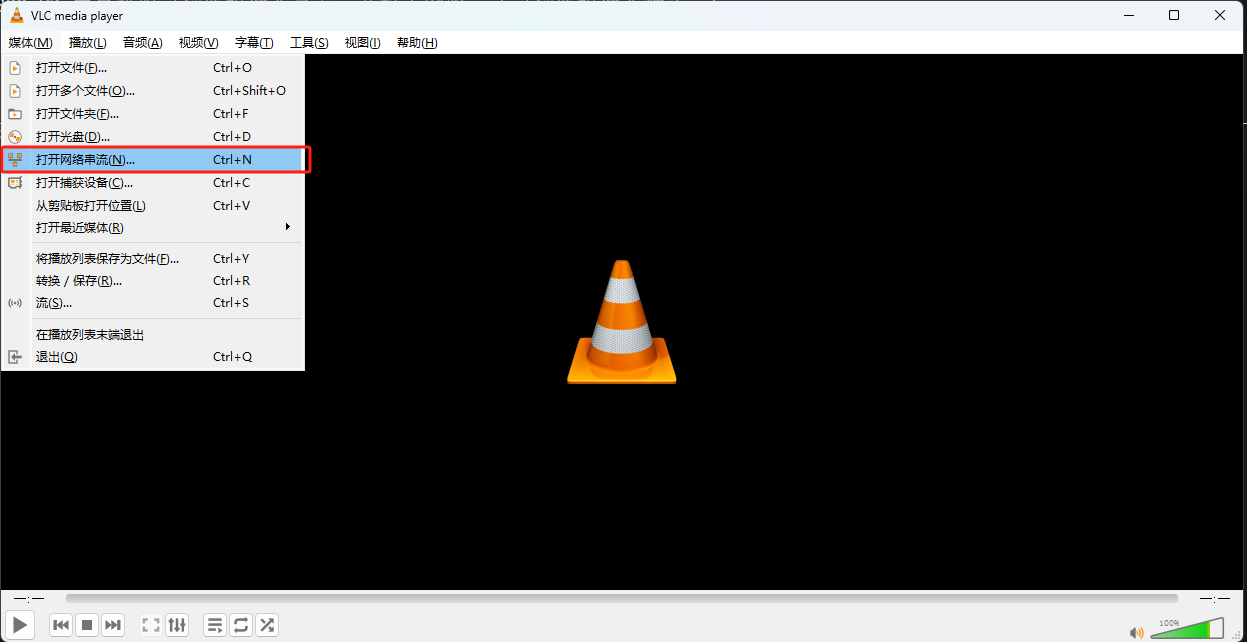
快速启动固件启动后,MIPI DM-M10R800 V2 屏幕模组可预览摄像头画面。若接入网络,还可预览摄像头推流 rtsp。
Linux PC 预览命令:
vlc rtsp://<设备 ip 地址>
Windows PC 则需要下载 vlc 应用,并且输入串流地址来预览。
 注意:该快速启动固件
注意:该快速启动固件仅适用于 CORE-1126-JD4 V1.1 版本的核心板。核心板版本详见硬件上的丝印。