RTC¶
Introduction¶
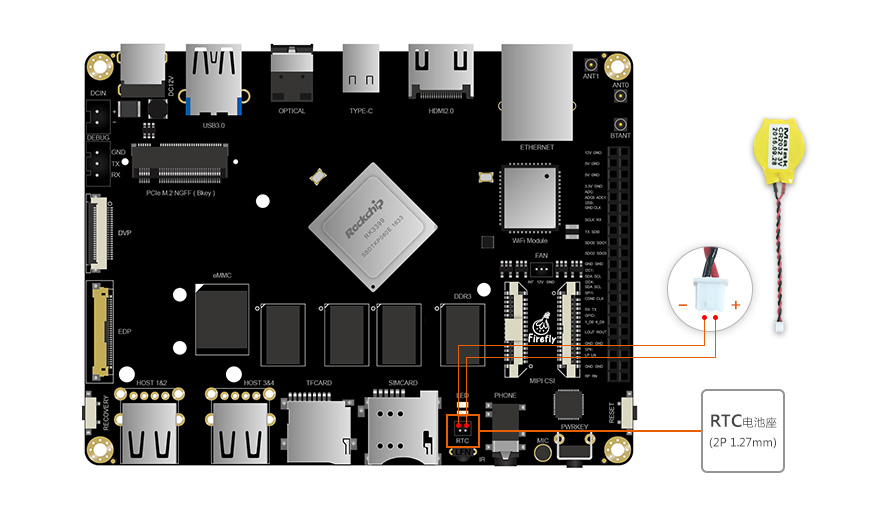
The Firefly-RK3399 development board has an RTC (Real Time Clock) integrated into the RK808. The main functions are Clock, calendar, alarm Clock, periodic interrupt, dual channel 32KHz Clock output.
After J2 is connected with CR2032 button battery, it can ensure that the RTC can run normally after the power of the board is lost. The location of J2 is as follows:
RTC drive¶
DTS configuration information is stored on the rk808 node.
Driver code path : drivers/rtc/rtc-rk808.c
Interface usage¶
Linux provides three user-space call interfaces. The corresponding path in the Firefly-RK3399 development board is:
SYSFS Interface :
/sys/class/rtc/rtc0/PROCFS Interface :
/proc/driver/rtcIOCTL Interface :
/dev/rtc0
SYSFS Interface¶
You can directly use the interface below cat and echo operations /sys/class/rtc/rtc0/.
For example, check the date and time of the current RTC:
# cat /sys/class/rtc/rtc0/date
2013-01-18
# cat /sys/class/rtc/rtc0/time
09:36:10
Set the startup time, such as starting up after 120 seconds:
#Start the machine regularly after 120 seconds
echo +120 > /sys/class/rtc/rtc0/wakealarm
# View boot time
cat /sys/class/rtc/rtc0/wakealarm
#To turn it off
reboot -p
PROCFS Interface¶
Print RTC related information:
# cat /proc/driver/rtc
rtc_time : 09:34:59
rtc_date : 2013-01-18
alrm_time : 08:52:45
alrm_date : 2013-01-18
alarm_IRQ : no
alrm_pending : no
update IRQ enabled : no
periodic IRQ enabled : no
periodic IRQ frequency : 1
max user IRQ frequency : 64
24hr : yes
IOCTL Interface¶
You can use ioctl to control /dev/rtc0.
Please refer to the document kernel/Documentation/rtc.txt for detailed instructions.