4. 无线模块¶
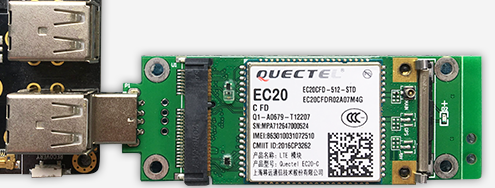
4.1. EC20 4G模组套件¶
4.1.1. 产品参数¶
型号
EC20-C R2.0 Mini PCIe-C
电源电压
3.3V~ 3.6V, 典型值: 3.3V
工作频段
TDD-LTE: B38/B39/B40/B41
FDD-LTE: B1/B3/B8
WCDMA: B1/B8
TD-SCDMA: B34/B39
GSM: 900/1800
数据传输
TDD-LTE: Max 130Mbps (DL) Max 35Mbps (UL)
FDD-LTE: Max 150Mbps (DL) Max 50Mbps (UL)
DC-HSPA+: Max 42Mbps (DL) Max 5.76Mbps (UL)
UMTS: Max 384Kbps (DL) Max 384Kbps (UL)
TD-SCDMA: Max 4.2Mbps (DL) Max 2.2Mbps (UL)
CDMA: Max 3.1Mbps (DL) Max 1.8Mbps (UL)
EDGE: Max 236.8Kbps (DL) Max 236.8Kbps (UL)
GPRS: Max 85.6Kbps (DL) Max 85.6Kbps (UL)
接口连接器
USB:USB 2.0 高速接口, 480Mbps
数字语音:1个数字语音接口 (可选)
USIM:1.8V/3V
网络指示:×2, NET_STATUS 和 NET_MODE
UART:×1 UART
复位:低电平
PWRKEY:低电平
天线接口:×3 (主天线, 分集天线和GNSS天线接口)
ADC:×2
结构尺寸
51.0mm × 30.0mm × 4.9mm
重量
约 10.5g
认证
CCC/ NAL*/ TA
4.1.2. 实物图¶

4.1.4. 参考固件¶
公版固件默认支持 EC20 4G 模组。
4.2. GNSS 模块¶
4.2.1. DELINCOMM 系列¶

4.2.1.2. 连接方法¶
对于 DELICOMM 系列的GPS模块,需用到 VCC (红线),GND (黑线),TX (白线),分别接到 Firefly-RK3288 UART3对应的 3.3V、GND、RX 这三个地方。
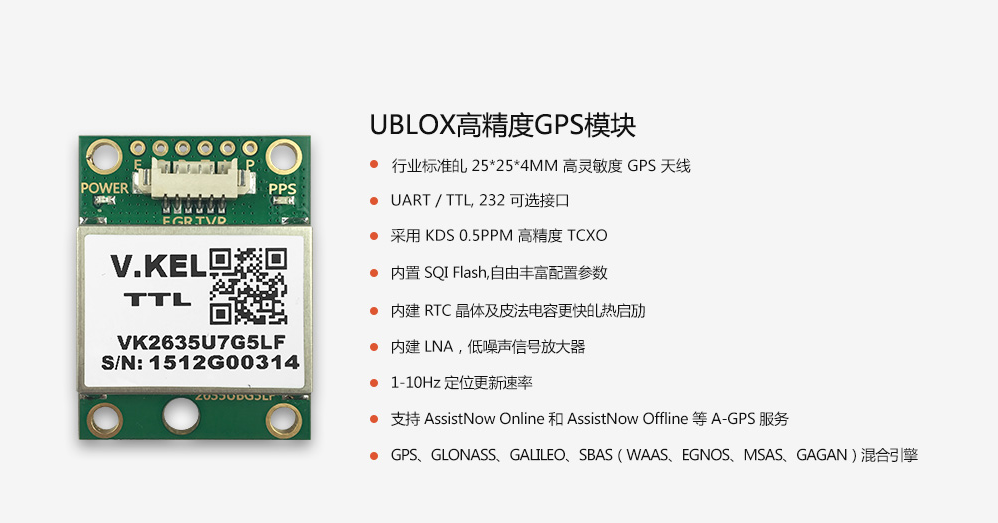
4.2.2. DK2635U7F 模块¶
4.2.2.2. 连接方法¶
对于 UBLOX 模块,同样需用到 VCC (白线),GND (黑线),TX (蓝线),可以分别接到 Firefly-RK3288 UART3对应的 3.3V、GND、RX 这三个地方。
4.2.3. 修改方法¶
修改与 GPS 连接的串口节点,或者直接修改机器上 /system/etc/u-blox.conf。
--- a/device/rockchip/rk3288/gps/u-blox.conf
+++ b/device/rockchip/rk3288/gps/u-blox.conf
@@ -35,7 +35,7 @@
### Serial interface
# Device to be used by the driver
-SERIAL_DEVICE /dev/ttyS4
+SERIAL_DEVICE /dev/ttyS3
#SERIAL_DEVICE /dev/s3c2410_serial2
#SERIAL_DEVICE /dev/i2c-4
#SERIAL_DEVICE /dev/ttyACM0
4.2.4. 参考固件¶
公版固件默认关闭该功能,用户可以根据需要修改 /system/build.prop里面 ro.factory.hasGPS 参数 (false/true),实现禁止或者使能 GPS 功能,改完之后重启机器使之生效。
4.2.5. 注意事项¶
GPS功能会占用到UART3,若需要用UART3作为其他用途,需要将GPS的功能先禁止掉。