
3. CAN¶
3.1. Introduction¶
Controller area network (can) is a kind of serial communication network which can effectively support distributed control or real-time control. Can bus is a bus protocol widely used in automobile, which is designed as the communication of microcontroller in automobile environment.
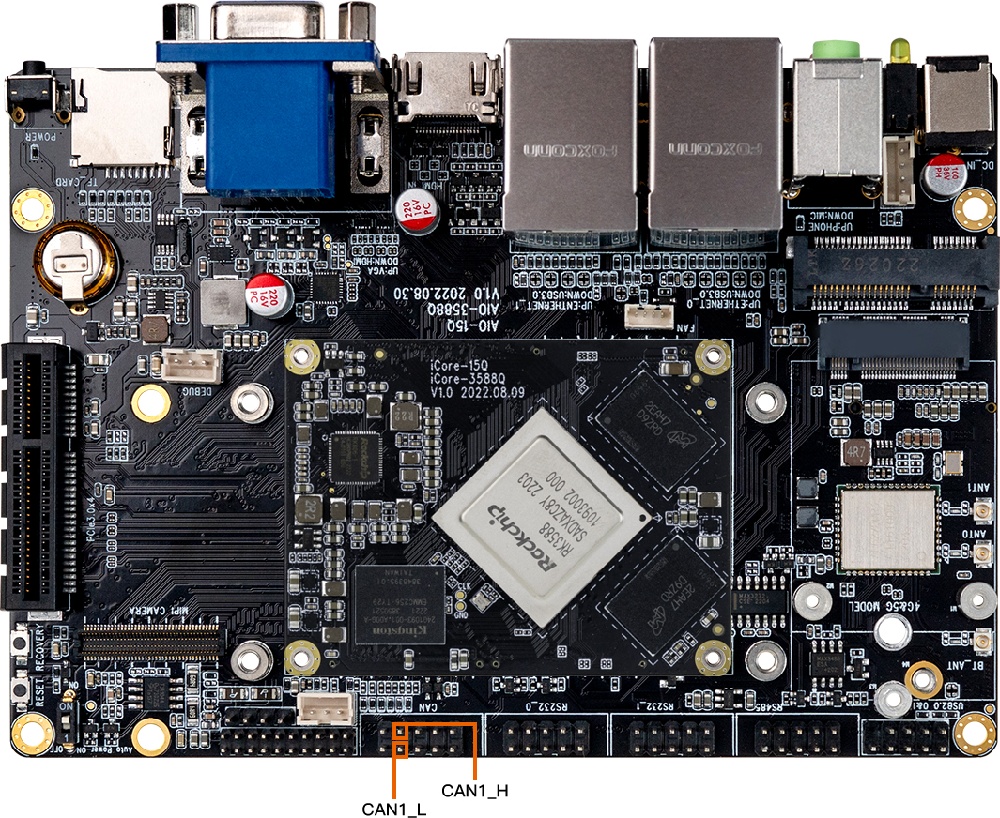
3.2. Hardware Connection¶
Connection between two CAN devices, only need CAN_H to CAN_H, CAN_L to CAN_L.
3.3. DTS Configuration¶
Common
kernel-5.10/arch/arm64/boot/dts/rockchip/rk3588s.dtsi
can0: can@fea50000 {
compatible = "rockchip,can-2.0";
reg = <0x0 0xfea50000 0x0 0x1000>;
interrupts = <GIC_SPI 341 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&cru CLK_CAN0>, <&cru PCLK_CAN0>;
clock-names = "baudclk", "apb_pclk";
resets = <&cru SRST_CAN0>, <&cru SRST_P_CAN0>;
reset-names = "can", "can-apb";
pinctrl-names = "default";
pinctrl-0 = <&can0m0_pins>;
tx-fifo-depth = <1>;
rx-fifo-depth = <6>;
status = "disabled";
};
can1: can@fea60000 {
compatible = "rockchip,can-2.0";
reg = <0x0 0xfea60000 0x0 0x1000>;
interrupts = <GIC_SPI 342 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&cru CLK_CAN1>, <&cru PCLK_CAN1>;
clock-names = "baudclk", "apb_pclk";
resets = <&cru SRST_CAN1>, <&cru SRST_P_CAN1>;
reset-names = "can", "can-apb";
pinctrl-names = "default";
pinctrl-0 = <&can1m0_pins>;
tx-fifo-depth = <1>;
rx-fifo-depth = <6>;
status = "disabled";
};
can2: can@fea70000 {
compatible = "rockchip,can-2.0";
reg = <0x0 0xfea70000 0x0 0x1000>;
interrupts = <GIC_SPI 343 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&cru CLK_CAN2>, <&cru PCLK_CAN2>;
clock-names = "baudclk", "apb_pclk";
resets = <&cru SRST_CAN2>, <&cru SRST_P_CAN2>;
reset-names = "can", "can-apb";
pinctrl-names = "default";
pinctrl-0 = <&can2m0_pins>;
tx-fifo-depth = <1>;
rx-fifo-depth = <6>;
status = "disabled";
};
Board
arch/arm64/boot/dts/rockchip/rk3588-firefly-aio-3588q.dtsi
&can1 {
status = "okay";
assigned-clocks = <&cru CLK_CAN1>;
assigned-clock-rates = <200000000>;
pinctrl-names = "default";
pinctrl-0 = <&can1m1_pins>;
};
Because there is only one CAN device created by the system according to the dts , and the first device created is CAN0.
3.4. Communication¶
3.4.1. CAN communication test¶
Use the “candump” and “cansend” tools directly to send and receive messages, push tool into /system/bin/ . Tools “candump/cansend” are included with the SDK and download from Officail link or github.
#Close the can0 device at the transceiver
ip link set can0 down
#Set the bit rate to 250Kbps at the transceiver
ip link set can0 type can bitrate 250000
#Show can0 details
ip -details link show can0
#Open the can0 device at the transceiver
ip link set can0 up
#Perform candump on the receiving end, blocking waiting for messages
candump can0
#Execute cansend at the sending end to send the message
cansend can0 123#1122334455667788
3.5. More Command¶
1、 ip link set canX down //turn off CAN device
2、 ip link set canX up //turn on CAN device
3、 ip -details link show canX //show CAN device details
4、 candump canX //Receive data from CAN bus
5、 ifconfig canX down //shutdown CAn device
6、 ip link set canX up type can bitrate 250000 //Set CAN Baudrate
7、 conconfig canX bitrate + (Baudrate)
8、 canconfig canX start //start CAN device
9、 canconfig canX ctrlmode loopback on //loopback test
10、canconfig canX restart //restart CAN device
11、canconfig canX stop //stop CAN device
12、canecho canX //check CAN device status查看can设备总线状态;
13、cansend canX --identifier=ID+data //send data
14、candump canX --filter=ID:mask //Use the filter to receive ID matching data