1. 介绍¶
为了满足用户对系统实时性的需求,官方在 SDK 源码的内核基础上支持升级 Linux 到 RTLinux。 我们RTlinux支持有preempt和xenomai两个版本,下面以preempt版本来测试。
1.1. RTLinux 系统固件支持¶
支持RK3562、RK356X及RK3588等芯片平台,可前往对应机器版型下载固件页面下载实时固件。如需要源码请联系商务。
1.2. 测试实时效果¶
测试实时性能需要cyclictest,可以使用apt安装。
apt update
apt install rt-tests
1.2.1. 测试RTLinux的实时效果¶
使用stress或stress-ng模拟通用的压力场景,使CPU处于满负荷状态。
# 根据芯片核心数运行cpu压测线程、io压测线程及内存压测线程
stress --cpu 4 --io 4 --vm 4 --vm-bytes 256M --timeout 259200s &
执行以下命令测试每个核心实时响应延迟,将进行为期3天的测试,测试完成后的测试结果输出到output文件。
cyclictest -m -S -p99 -i1000 -h800 -D3d -q > output
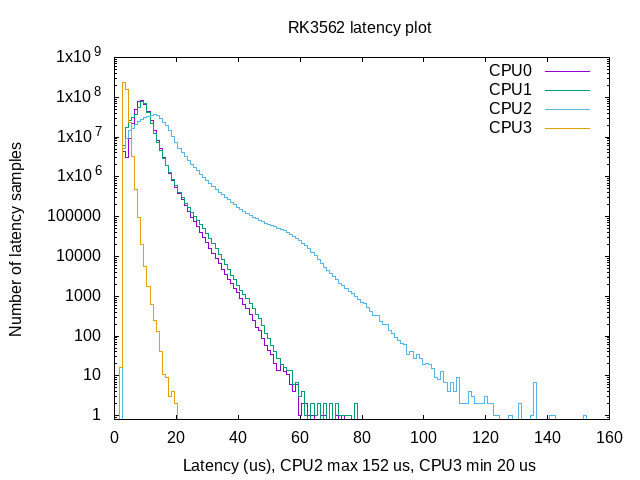
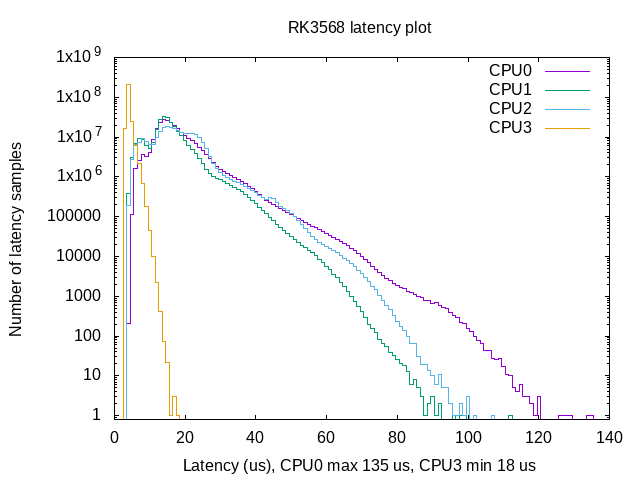
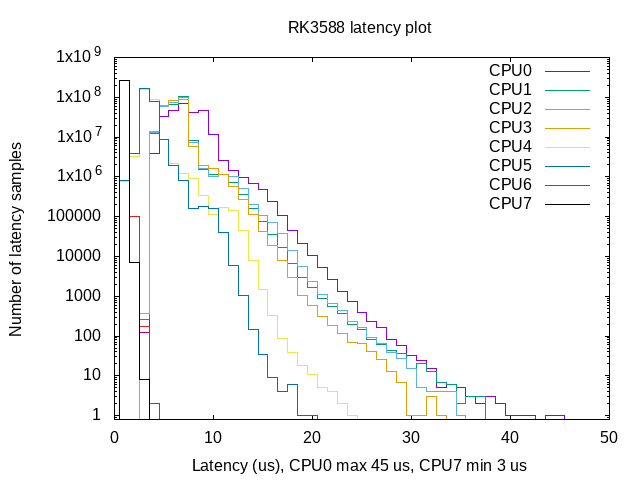
我们执行以上操作分别在rk3568、rk3562及rk3588进行3天的延迟测试。其中rk3568和rk3562将CPU3从内核SMP平衡和调度算法中剔除,而rk3588将CPU6和CPU7从内核SMP平衡和调度算法中剔除,以便观察芯片最好的实时性能。
为了便于观察,我们将rk3568、rk3562及rk3588的测试结果转换成直方图和表,如下所示。 在本次测试中,RK3562的CPU2核心Max Latencies值最大,为152us,隔离CPU3核心(从内核SMP平衡和调度算法中剔除的核心)的Max Latencies值最小,为20us。 RK3568的CPU0核心的Max Latencies值最大,为135us,隔离CPU3核心的Max Latencies值最小,为18us。 RK3588的CPU0核心的Max Latencies值最大,为45us,隔离CPU7核心的Max Latencies值最小,为3us。
由此可见,在同芯片平台下隔离核心的实时性最好。所以尽量将我们的实时任务绑定到隔离核心运行,以获得最好的实时效果。
| Latencies \ Core | CPU0 | CPU1 | CPU2 | CPU3 |
|---|---|---|---|---|
| Total | 420738794 | 420738789 | 420738773 | 420738757 |
| Min Latencies | 00003 | 00003 | 00003 | 00002 |
| Avg Latencies | 00009 | 00008 | 000012 | 00003 |
| Max Latencies | 00074 | 00078 | 00152 | 00020 |
| Latencies \ Core | CPU0 | CPU1 | CPU2 | CPU3 |
|---|---|---|---|---|
| Total | 259200000 | 259199935 | 259199824 | 259199769 |
| Min Latencies | 00004 | 00003 | 00003 | 00003 |
| Avg Latencies | 000017 | 000015 | 000017 | 00004 |
| Max Latencies | 000135 | 000112 | 00107 | 00018 |
| Latencies \ Core | CPU0 | CPU1 | CPU2 | CPU3 | CPU4 | CPU5 | CPU6 | CPU7 |
|---|---|---|---|---|---|---|---|---|
| Total | 259200000 | 259199978 | 259199943 | 259199926 | 259199914 | 259199930 | 259199871 | 259199898 |
| Min Latencies | 00003 | 00003 | 00003 | 00003 | 00001 | 00001 | 00001 | 00001 |
| Avg Latencies | 00007 | 00006 | 00006 | 00006 | 00003 | 00003 | 00001 | 00001 |
| Max Latencies | 00045 | 00037 | 00035 | 00033 | 00024 | 00020 | 00004 | 00003 |
1.2.1.1. 其他压力场景¶
不同场景的延迟测试结果不尽相同,为了尽可能接近我们的生产环境,可同时制作其他压力场景,如: 制造网络压力:
#使用iperf进行上下行同时测试,使网卡的发送和接收处于满负载状态
iperf -c 192.168.1.220 -p 8001 -f m -i100 -d -t 259200
制造gpu压力:
#无限地运行,从最后一个基准循环到第一个基准
glmark2-es2-wayland --run-forever
1.2.2. Cyclictest标准测试¶
threads选项(-t)用于指定Cyclictest在检测延迟时将使用的测量线程数。通常,在系统上的每个CPU上只运行一个测量线程是一个标准的测试方案。可以使用亲和性选项(-a)指定线程必须在其上执行的cpu。
这些选项对于最小化运行Cyclictest对观察到的系统的影响至关重要。在使用Cyclictest时,确保在任何给定时间只执行一个测量线程是很重要的。如果两个或多个Cyclictest线程的预期执行时间重叠,则Cyclictest的测量将受到其自己的测量线程所造成的延迟的影响。确保在给定的时间只执行一个测量线程的最好方法是在给定的CPU上只执行一个测量线程。
例如,如果要分析三个特定cpu的延迟,则指定应该使用这些cpu(使用-a选项),并指定应该使用三个测量线程(使用-t选项)。在这种情况下,为了最小化Cyclictest的开销,请确保收集度量数据的主Cyclictest线程没有运行在三个隔离的cpu之一上。主线程的关联性可以使用taskset程序设置,如下所述。
1.2.2.1. 在评估一组隔离的cpu上的延迟时,减小cyclictest的影响¶
在测量cpu子集上的延迟时,确保主Cyclictest线程正在未被评估的cpu上运行。例如,如果一个系统有两个CPU,并且正在评估CPU 0上的延迟,那么主Cyclictest线程应该固定在CPU 1上。Cyclictest的主线程不是实时的,但是如果它在被评估的CPU上执行,它可能会对延迟产生影响,因为会有额外的上下文切换。在启动Cyclictest之后,可以使用taskset命令将主线程限制为在cpu的某个子集上执行。例如,针对CPU1到CPU3的延时测试:
#CPU1到CPU3运行实时程序,主线运行在CPU0上
taskset -c 0 ./cyclictest -t3 -p99 -a 1-3
taskset程序还可以用于确保系统上运行的其他程序不会影响隔离CPU上的延迟。例如,启动程序top查看线程并固定到CPU 0上,使用下面的命令:
taskset --cpu 0 top -H -p PID
#top打开之后点击f键,光标移动到 P 选项,空格选中,然后点击 q建退出,便可查看到实时线程在哪些CPU上运行。
1.3. 提高实时策略¶
1.3.1. 抑制控制台消息及禁止内存过度使用¶
#可以使用内核参数quiet启动内核,或者启动之后抑制,如下:
echo 1 > /proc/sys/kernel/printk
#禁用内存过度使用以避免 Out-of-Memory Killer产生的延迟
echo 2 > /proc/sys/vm/overcommit_memory
1.3.2. 不使用桌面或者使用轻量级窗口管理器¶
为了更好的实时,我们不建议使用带桌面的系统,因为这将为CPU延迟带来很大的挑战。建议使用minimal ubuntu、自己的QT程序等。 356x的rt固件默认不使用桌面,而是使用窗口管理器weston,显示协议是Wayland。
1.3.2.1. 切换X11环境¶
如果你需要X11的环境,可手动切换到X11
sudo set_display_server x11
reboot
#sudo set_display_server weston 可再次切换回weston,重启生效
1.3.2.1.1. 使用openbox 窗口管理器启动¶
切换到X11环境默认使用桌面,如果需要使用轻量级的窗口管理器 在/etc/lightdm/lightdm.conf 指定ession使用openbox窗口管理器:
cat /etc/lightdm/lightdm.conf.d/20-autologin.conf
[Seat:*]
user-session=openbox
autologin-user=firefly
1.3.2.1.2. 只运行自己的X11程序¶
若是不用登录管理器启动 X显示服务,可使用xinit手动启动Xorg显示服务。 执行xinit和startx时,它们将寻找~/.xinitrc做为shell脚本运行以启动客户端程序。 若是~/.xinitrc不存在,startx将运行默认值/etc/X11/xinit/xinitrc(默认的xinitrc启动一个Twm,xorg-xclock和Xterm环境)。
首先关闭lightdm服务
systemctl disable lightdm
然后使用startx启动自己的程序
startx chromium
也可修改默认startx指定的client 的xinitrc文件,默认的会运行Xorg
vim /etc/X11/xinit/xinitrc
-------------------------------------------------------------
#!/bin/sh
# /etc/X11/xinit/xinitrc
#
# global xinitrc file, used by all X sessions started by xinit (startx)
# invoke global X session script
#. /etc/X11/Xsession
#chromium --window-size=1920,1080
chromium --start-maximized
1.3.3. 绑定核心¶
实时要求高的事件固定到某个核心上处理,系统及其它实时要求不高的事件集中到一个核心上处理。例如特定的中断,实时程序等事件可以用专门的核心为他们服务。
1.3.3.2. 中断绑定核心¶
由于arm将所有外设中断全部由cpu0处理,对于重要的中断可以在系统启动之后将中断绑定到其他核心。 例如将eth0中断绑定到cpu2
root@firefly:~# cat /proc/interrupts | grep eth0
38: 28600296 0 0 0 GICv3 64 Level eth0
39: 0 0 0 0 GICv3 61 Level eth0
root@firefly:~# cat /proc/irq/38/smp_affinity_list
0-3
root@firefly:~# echo 2 > /proc/irq/38/smp_affinity_list
root@firefly:~# cat /proc/irq/38/smp_affinity_list
2
root@firefly:~# cat /proc/interrupts | grep eth0
38: 29009292 0 52859 0 GICv3 64 Level eth0
39: 0 0 0 0 GICv3 61 Level eth0
1.3.4. 使用smp+amp方案¶
对于实时要求更高的,可以使用amp方案,以达到更好的实时控制。 rk3568支持了amp(非对称多核架构),你可以定制某些核心跑定制的系统。 比如0~2核心跑kernel,3核心跑rt-thread等;支持 Linux(Kernel-4.19、rt-kernel-4.19)、 Baremetal(HAL)、RTOS(RT-Thread) 组合AMP构建形式,可任意搭配。 不同内核之间可以使用核间通信来进行信息交互。