
13. SPI 使用¶
13.2. SPI 工作方式¶
SPI 以主从方式工作,这种模式通常有一个主设备和一个或多个从设备,需要至少 4 根线,分别是:
CS 片选信号
SCLK 时钟信号
MOSI 主设备数据输出、从设备数据输入
MISO 主设备数据输入,从设备数据输出
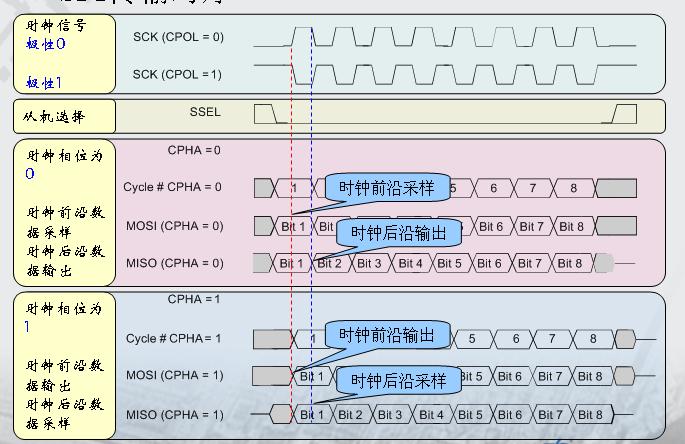
Linux 内核用 CPOL 和 CPHA 的组合来表示当前 SPI 的四种工作模式:
CPOL=0,CPHA=0 SPI_MODE_0
CPOL=0,CPHA=1 SPI_MODE_1
CPOL=1,CPHA=0 SPI_MODE_2
CPOL=1,CPHA=1 SPI_MODE_3
CPOL:表示时钟信号的初始电平的状态,0为低电平,1为高电平。
CPHA:表示在哪个时钟沿采样,0为第一个时钟沿采样,1为第二个时钟沿采样。
SPI 的四种工作模式波形图如下:
13.3. 驱动编写¶
下面以 XM25QU128C Flash 模块为例简单介绍 SPI 驱动的编写。
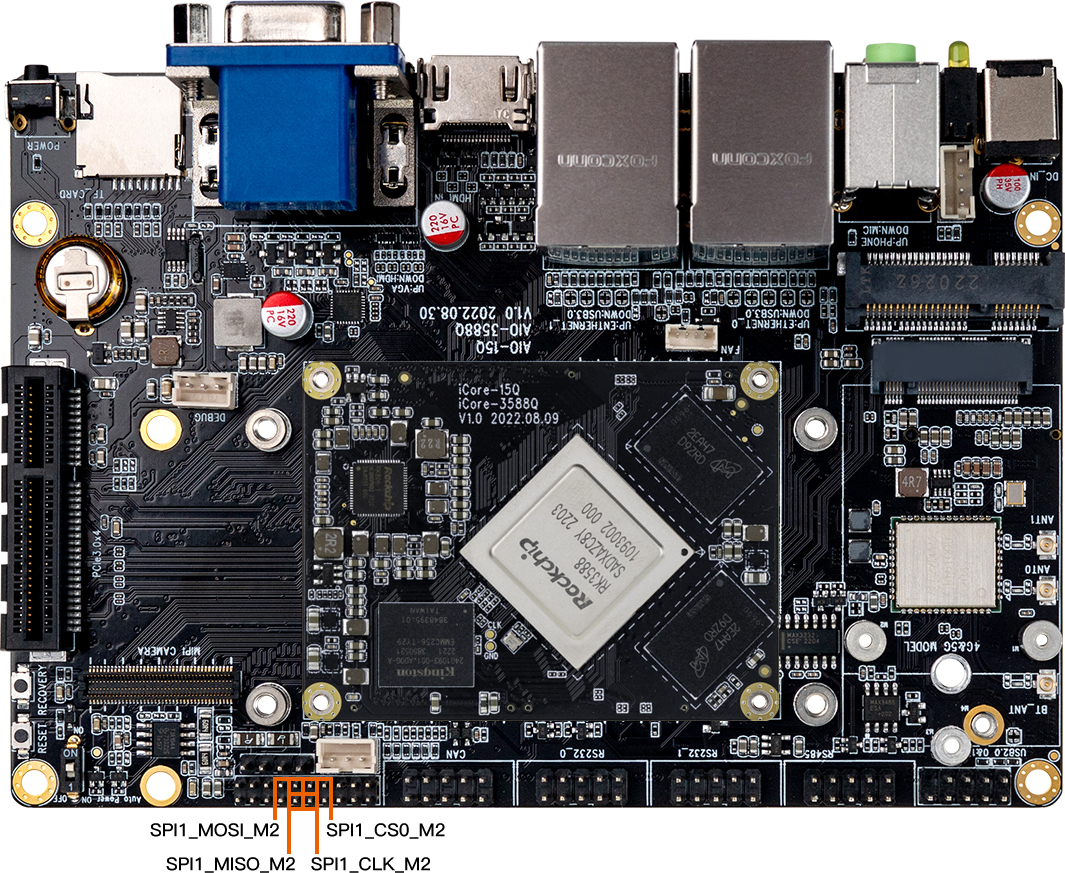
13.3.1. 硬件连接¶
AIO-3588Q 与 XM25QU128C 硬件连接如下表:
| XM25QU128C | AIO-3588Q |
|---|---|
| /CS | SPI1_M2_CS0 |
| D0 | SPI1_M2_RX |
| GND | GND |
| VCC | 1.8V |
| CLK | SPI1_M2_CLK |
| D1 | SPI1_M2_TX |
13.3.2. 编写Makefile/Kconfig¶
在 kernel-5.10/drivers/spi/Kconfig 中添加对应的驱动文件配置:
config SPI_FIREFLY
tristate "Firefly SPI demo support "
default y
help
Select this option if your Firefly board needs to run SPI demo.
在 kernel-5.10/drivers/spi/Makefile 中添加对应的驱动文件名:
obj-$(CONFIG_SPI_FIREFLY) += spi-firefly-demo.o
13.3.3. 配置 DTS 节点¶
在 kernel-5.10/arch/arm64/boot/dts/rockchip/rk3588-firefly-demo.dtsi 中添加 SPI 驱动结点描述,如下所示:
/* Firefly SPI demo */
&spi1{
spi_demo: spi_demo@00{
compatible = "firefly,rk3588-spi";
status = "okay";
reg = <0x00>;
spi-max-frequency = <50000000>;
//spi-cpha; /* SPI mode: CPHA=1 */
//spi-cpol; /* SPI mode: CPOL=1 */
//spi-cs-high;
};
};
&spidev1 {
status = "disabled";
};
status:如果要启用 SPI,则设为
okay,如不启用,设为disable。spi-demo@00:由于本例子使用 CS0,故此处设为
00,如果使用 CS1,则设为01。compatible:这里的属性必须与驱动中的结构体:of_device_id 中的成员 compatible 保持一致。
reg:此处与 spi-demo@00 保持一致,本例设为:0x00。
spi-max-frequency:此处设置 spi 使用的最高频率,AIO-3588Q 最高支持 50000000。
spi-cpha,spi-cpol:SPI 的工作模式在此设置,本例所用的模块 SPI 工作模式为 SPI_MODE_0 或者 SPI_MODE_3,这里我们选用 SPI_MODE_0,如果使用 SPI_MODE_3,spi_demo 中打开 spi-cpha 和 spi-cpol 即可。
13.3.4. 定义SPI驱动¶
在内核源码目录 kernel-5.10/drivers/spi/ 中创建新的驱动文件,如:spi-firefly-demo.c。
在定义 SPI 驱动之前,用户首先要定义变量 of_device_id 。of_device_id 用于在驱动中调用 DTS 文件中定义的设备信息,其定义如下所示:
static struct of_device_id firefly_match_table[] = { { .compatible = "firefly,rk3588-spi",},{},};
此处的 compatible 与 DTS 文件中的保持一致。
spi_driver定义如下所示:
static struct spi_driver firefly_spi_driver = {
.driver = {
.name = "firefly-spi",
.owner = THIS_MODULE,
.of_match_table = firefly_match_table,},
.probe = firefly_spi_probe,};
};
13.3.5. 注册SPI设备¶
在初始化函数 static int __init firefly_spi_init(void) 中向内核注册 SPI 驱动:spi_register_driver(&firefly_spi_driver);
如果内核启动时匹配成功,则 SPI 核心会配置 SPI 的参数(mode、speed 等),并调用 firefly_spi_probe。
13.3.6. 读写 SPI 数据¶
firefly_spi_probe中使用了两种接口操作读取XM25QU128C的 ID:firefly_spi_read_xm25x_id_0接口直接使用了spi_transfer和spi_message来传送数据。firefly_spi_read_xm25x_id_1接口则使用 SPI 接口spi_write_then_read来读写数据。
成功后会打印:
console:/ $ dmesg | grep spi
[ 1.791786] [ T1] firefly-spi spi1.0: Firefly SPI demo program
[ 1.791788] [ T1] firefly spi demo
[ 1.791795] [ T1] firefly-spi spi1.0: firefly_spi_probe: setup mode 0, 8 bits/w, 50000000 Hz max
[ 1.791797] [ T1] spi demo mode ; 0
[ 1.791838] [ T1] firefly_spi_read_xm25x_id_0 ID = 20 41 18
[ 1.791875] [ T1] firefly_spi_read_xm25x_id_1 ID = 20 41 18
13.3.7. 打开 SPI demo¶
spi-firefly-demo 默认没有打开,如果需要的话可以使用以下补丁打开 demo 驱动:
--- a/kernel-5.10/arch/arm64/boot/dts/rockchip/rk3588-firefly-demo.dtsi
+++ b/kernel-5.10/arch/arm64/boot/dts/rockchip/rk3588-firefly-demo.dtsi
@@ -64,7 +64,7 @@ /* Firefly SPI demo */
&spi1 {spi_demo: spi-demo@00{
- status = "disabled";
+ status = "okay";
compatible = "firefly,rk3588-spi";
reg = <0x00>;
spi-max-frequency = <50000000>;
13.3.8. 常用 SPI 接口¶
下面是常用的 SPI API 定义:
void spi_message_init(struct spi_message *m);
void spi_message_add_tail(struct spi_transfer *t, struct spi_message *m);
int spi_sync(struct spi_device *spi, struct spi_message *message) ;
int spi_write(struct spi_device *spi, const void *buf, size_t len);
int spi_read(struct spi_device *spi, void *buf, size_t len);
ssize_t spi_w8r8(struct spi_device *spi, u8 cmd);
ssize_t spi_w8r16(struct spi_device *spi, u8 cmd);
ssize_t spi_w8r16be(struct spi_device *spi, u8 cmd);
int spi_write_then_read(struct spi_device *spi, const void *txbuf, unsigned n_tx, void *rxbuf, unsigned n_rx);
13.4. 接口使用¶
Linux 提供了一个功能有限的 SPI 用户接口,如果不需要用到 IRQ 或者其他内核驱动接口,可以考虑使用接口 spidev 编写用户层程序控制 SPI 设备。在 AIO-3588Q 开发板中对应的路径为: /dev/spidev1.0
spidev 对应的驱动代码:kernel-5.10/drivers/spi/spidev.c
内核 config 需要选上 SPI_SPIDEV:
│ Symbol: SPI_SPIDEV [=y]
│ Type : tristate
│ Prompt: User mode SPI device driver support
│ Location:
│ -> Device Drivers
│ -> SPI support (SPI [=y])
│ Defined at drivers/spi/Kconfig:684
│ Depends on: SPI [=y] && SPI_MASTER [=y]
DTS 配置如下:
&spi1{
status = "okay";
pinctrl-0 = <&spi1m2_cs0 &spi1m2_pins>;
max-freq = <50000000>;
spidev1: spidev@00{
compatible = "rockchip,spidev";
status = "okay";
reg = <0x0>;
spi-max-frequency = <50000000>;
};
};
spidev的详细使用说明请参考文档kernel-5.10/Documentation/spi/spidev.rst