I2C¶
Introduction¶
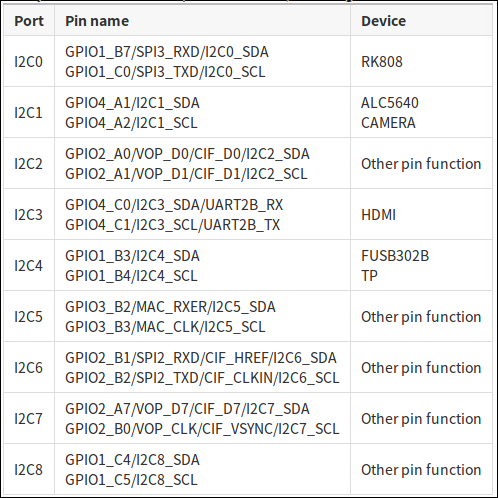
There are 9 on-chip I2C controllers on the AIO-3399J development board, and the usage of each I2C is shown in the following table:
This article mainly describes how to configure I2C on the development board.
Configuring I2C can be divided into two steps:
Define and register I2C devices.
Define and register I2C drivers.
Let’s take configuring GSL3680 as an example.
Define and register I2C devices¶
When registering an I2C device, the i2c_client structure is required to describe the I2C device. However, in standard Linux, users only need to provide the corresponding I2C device information, and Linux will construct the i2c_client structure based on the information provided.
The I2C device information provided by the user is written to the DTS file in the form of nodes, as shown below:
kernel/arch/arm64/boot/dts/rockchip/rk3399-firefly-mini-edp.dts
&i2c4 {
status = "okay";
gsl3680: gsl3680@41 {
compatible = "gslX680";
reg = <0x41>;
screen_max_x = <1536>;
screen_max_y = <2048>;
touch-gpio = <&gpio1 20 IRQ_TYPE_LEVEL_LOW>;
reset-gpio = <&gpio0 12 GPIO_ACTIVE_HIGH>;
};
};
Define and register I2C drivers¶
Define I2C drivers¶
Before defining the I2C driver, the user first defines the variables of_device_id and i2c_device_id.
of_device_id is used to call the device information defined in the DTS file in the driver, which is defined as follows:
static struct of_device_id gsl_ts_ids[] = {
{.compatible = "gslX680"},
{}
};
Define i2c_device_id:
static const struct i2c_device_id gsl_ts_id[] = {
{GSLX680_I2C_NAME, 0},
{}
};
MODULE_DEVICE_TABLE(i2c, gsl_ts_id);
i2c_driver is shown as follows:
static struct i2c_driver gsl_ts_driver = {
.driver = { .name = GSLX680_I2C_NAME,
.owner = THIS_MODULE,
.of_match_table = of_match_ptr(gsl_ts_ids),
},
#ifndef CONFIG_HAS_EARLYSUSPEND
//.suspend = gsl_ts_suspend,
//.resume = gsl_ts_resume,
#endif
.probe = gsl_ts_probe,
.remove = gsl_ts_remove,
.id_table = gsl_ts_id,
};
Note: id_table indicates the devices supported by the driver.
Register I2C drivers¶
Register the I2C driver with the i2c_add_driver() function.
i2c_add_driver(&gsl_ts_driver);
When i2c_add_driver() is called to register the I2C driver, the I2C device is traversed, and the probe function of the driver is called if the driver supports the device being traversed.
Send and receive data through I2C¶
After registering the I2C driver, I2C communication can be carried out.
Send information to slave machine:
int i2c_master_send(const struct i2c_client *client, const char *buf, int count)
{
int ret;
struct i2c_adapter *adap = client->adapter;
struct i2c_msg msg;
msg.addr = client->addr;
msg.flags = client->flags & I2C_M_TEN;
msg.len = count;
msg.buf = (char *)buf;
ret = i2c_transfer(adap, &msg, 1);
/*
+ If everything went ok (i.e. 1 msg transmitted), return #bytes
+ transmitted, else error code.
*/
return (ret == 1) ? count : ret;
}
Read information to slave machine:
int i2c_master_recv(const struct i2c_client *client, char *buf, int count)
{
struct i2c_adapter *adap = client->adapter;
struct i2c_msg msg;
int ret;
msg.addr = client->addr;
msg.flags = client->flags & I2C_M_TEN;
msg.flags |= I2C_M_RD;
msg.len = count;
msg.buf = buf;
ret = i2c_transfer(adap, &msg, 1);
/*
+ If everything went ok (i.e. 1 msg received), return #bytes received,
+ else error code.
*/
return (ret == 1) ? count : ret;
}
EXPORT_SYMBOL(i2c_master_recv);
FAQs¶
Q1: Communication failed. How do you debug ‘log: “timeout, ipd: 0x00, state: 1”’?¶
A1 : Please check whether the hardware pull-up is powered.
Q2: Call i2c_transfer and return -6?¶
A2 : A return value of -6 indicates an NACK error, that is, there is no response from the other device. This is generally a peripheral problem, which is common in the following situations:
I2C address error, the solution is to measure the I2C waveform, confirm whether I2C device address is wrong.
I2C slave device is not in normal working state, such as no power supply, wrong power on the timing sequence;
Timing does not comply with the requirements of I2C slave device will also generate Nack signal.
Q3: What happens when a peripheral requires a stop signal in the middle of a read sequence rather than a repeat start signal?¶
A3 : At this point, i2c_transfer needs to be called twice, and I2C read needs to be split into two times. The modification is as follows:
static int i2c_read_bytes(struct i2c_client *client, u8 cmd, u8 *data, u8 data_len) {
struct i2c_msg msgs[2];
int ret;
u8 *buffer;
buffer = kzalloc(data_len, GFP_KERNEL);
if (!buffer)
return -ENOMEM;;
msgs[0].addr = client->addr;
msgs[0].flags = client->flags;
msgs[0].len = 1;
msgs[0].buf = &cmd;
ret = i2c_transfer(client->adapter, msgs, 1);
if (ret < 0) {
dev_err(&client->adapter->dev, "i2c read failed\n");
kfree(buffer);
return ret;
}
msgs[1].addr = client->addr;
msgs[1].flags = client->flags | I2C_M_RD;
msgs[1].len = data_len;
msgs[1].buf = buffer;
ret = i2c_transfer(client->adapter, &msgs[1], 1);
if (ret < 0)
dev_err(&client->adapter->dev, "i2c read failed\n");
else
memcpy(data, buffer, data_len);
kfree(buffer);
return ret;
}