
无线模块¶
EC20 4G模组套件¶
产品参数¶
型号
EC20-C R2.0 Mini PCIe-C
电源电压
3.3V~ 3.6V, 典型值: 3.3V
工作频段
TDD-LTE: B38/B39/B40/B41
FDD-LTE: B1/B3/B8
WCDMA: B1/B8
TD-SCDMA: B34/B39
GSM: 900/1800 MHz
数据传输
TDD-LTE: Max 130Mbps (DL) Max 35Mbps (UL)
FDD-LTE: Max 150Mbps (DL) Max 50Mbps (UL)
DC-HSPA+: Max 42Mbps (DL) Max 5.76Mbps (UL)
UMTS: Max 384Kbps (DL) Max 384Kbps (UL)
TD-SCDMA: Max 4.2Mbps (DL) Max 2.2Mbps (UL)
CDMA: Max 3.1Mbps (DL) Max 1.8Mbps (UL)
EDGE: Max 236.8Kbps (DL) Max 236.8Kbps (UL)
GPRS: Max 85.6Kbps (DL) Max 85.6Kbps (UL)
接口连接器
USB:USB 2.0 高速接口, 480Mbps
数字语音:1个数字语音接口 (可选)
USIM:1.8V/3V
网络指示:×2, NET_STATUS 和 NET_MODE
UART:×1 UART
复位:低电平
PWRKEY:低电平
天线接口:×3 (主天线, 分集天线和GNSS天线接口)
ADC:×2
结构尺寸
51.0mm × 30.0mm × 4.9mm
重量
约 10.5g
认证
CCC/ NAL*/ TA
GNSS 功能¶
EC20 模组分带GNSS和不带GNSS两种,Firefly官网售卖的EC20 4G模组是不支持GNSS的,后缀为SNNS,支持GNSS功能的EC20 模组一般带有后缀SGNS,公版固件支持GNSS功能,但是默认关闭,使用方法可参考EC20 GNSS功能章节。
实物图¶


EC200T 4G模组套件¶
产品参数¶
型号
EC200T-CN Mini PCIe-D
电源电压
3.4V~ 4.3V, 典型值: 3.8V
工作频段
TDD-LTE: B34/B38/B39/B40/B41
FDD-LTE: B1/B3/B5/B8
WCDMA: B1/B5/B8
GSM: 900/1800 MHz
数据传输
TDD-LTE: Max 120Mbps (DL) Max 3Mbps (UL)
FDD-LTE: Max 150Mbps (DL) Max 50Mbps (UL)
DC-HSDPA: Max 21Mbps (DL)
HSDPA: Max 5.76 Mbps (UL)
WCDMA: Max 384Kbps (DL) Max 384Kbps (UL)
EDGE: Max 236.8Kbps (DL) Max 236.8Kbps (UL)
GPRS: Max 85.6Kbps (DL) Max 85.6Kbps (UL)
接口连接器
USB:USB 2.0 高速接口, 480Mbps
数字语音:1个数字语音接口 (可选)
USIM:1.8V/3V
UART:×1 UART
UART_DTR (睡眠控制)
W_DISABLE# (飞行模式控制)
LED_WWAN# (网络状态指示)
PERST# (模块复位)
RI (主机唤醒)
WAKEUP_IN (睡眠控制,低电平有效)
WAKEUP_OUT (睡眠状态指示)
天线接口:×2 (主天线, 分集天线)
结构尺寸
51.0mm × 30.0mm × 4.9mm
重量
约 10.2g
认证
CCC/SRRC/NAL
实物图¶

连接方法¶
GNSS 模块¶
DELINCOMM 系列¶

接口定义¶
VCC (红线)、GND (黑线)、TX (白线)、RX(绿线)
使用说明¶
硬件连接¶
将模组的VCC、GND、TX、RX分别接到 ROC-RK3399-PC-PLUS UART0(对应节点为
/dev/ttyS0)的3.3V、GND、RX、TX,注意避免接错VCC、GND、TX、RX导致烧坏模组对于UART的一些定义和说明可以参考Wiki教程《UART 使用》
软件配置¶
DELINCOMM系列串口波特率配置为9600,公版固件已经默认配置好,使能GPS后即可使用,详情可以参考如何使能GPS和修改串口配置。
注意:GPS功能会占用到 UART0,若需要用 UART0 作为其他用途,需要将GPS先禁止掉
DK2635U7F 模块¶
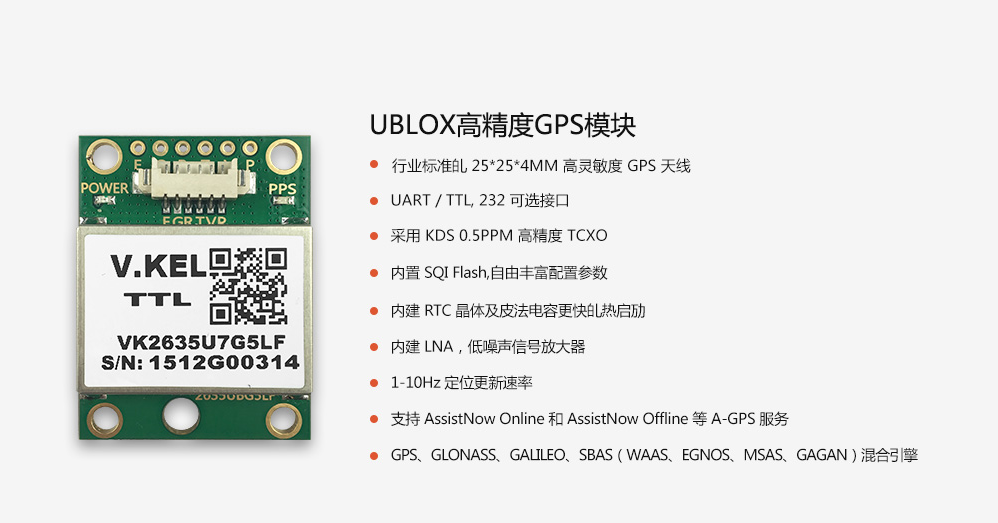
接口定义¶
VCC (白线)、GND (黑线)、TX (蓝线)、RX(绿线)
使用说明¶
硬件连接¶
将模组的VCC、GND、TX、RX分别接到 ROC-RK3399-PC-PLUS UART0(对应节点为
/dev/ttyS0)的3.3V、GND、RX、TX,注意避免接错VCC、GND、TX、RX导致烧坏模组对于UART的一些定义和说明可以参考Wiki教程《UART 使用》
软件配置¶
UBLOX模块串口波特率配置为9600,公版固件已经默认配置好,使能GPS后即可使用,详情可以参考如何使能GPS和修改串口配置。
注意:GPS功能会占用到 UART0,若需要用 UART0 作为其他用途,需要将GPS先禁止掉
EC20 GNSS功能¶
EC20模组支持GPS、GLONASS、GALILEO、BEIDOU,兼容标准 NMEA 0183 协议,可通过 USB NMEA 接口输出 1Hz 频率的 NMEA 信息,默认输出串口为/dev/ttyUSB1,波特率115200 bit/s。
天线要求¶
频率范围:1559MHz~1609MHz
极化:RHCP 或 Linear
VSWR:< 2(典型值)
有源天线噪声系数:< 1.5dB
有源天线增益:> 0dB
有源天线内嵌 LNA 增益:< 17dB
使用说明¶
硬件连接¶
EC20模组根据EC20 4G模组套件章节的说明连接,天线接入带有GPS丝印的天线接口。
软件配置¶
对于EC20模组,其GNSS 配置的串口节点和波特率分别为/dev/ttyUSB1、115200,使用模组之前需要检查/system/etc/u-blox.conf中SERIAL_DEVICE或者SERIAL_BAUD_RATE的值是否与之匹配,确认匹配则使能GPS后即可使用,使能方法参考如何使能GPS和修改串口配置。
注意:对于EC20模组,使用GNSS功能时,需要注意是否有接入其他的ttyUSB*设备,存在其他ttyUSB时,有可能会使EC20的默认ttyUSB设备号发生变化,导致GNSS功能无法使用
如何使能GPS和修改串口配置¶
名词解释:
SERIAL_DEVICE: 串口节点SERIAL_BAUD_RATE: 串口波特率
临时修改¶
确保固件为最新公版固件,固件默认关闭GPS功能,需要手动使能,以下是修改方法:
使能ADB,如何使能ADB参考Wiki教程《ADB的使用》
设置系统可读可写
adb shell setprop persist.sys.root_access 3 adb root && adb remount
修改参数
使能GPS:修改机器上
/system/build.prop(Android7.1以上的版本为/vendor/build.prop)里面ro.factory.hasGPS参数为true,实现使能GPS,软重启机器后生效。修改串口配置(串口节点或者波特率):将机器上
/system/etc/u-blox.conf里面SERIAL_DEVICE或者SERIAL_BAUD_RATE修改成对应模组配置的值,软重启机器后生效。
代码修改¶
使能GPS
修改SDK目录下
device/rockchip/rk3399/rk3399_roc_pc_plus.mk(Android7.1以上的版本为device/rockchip/rk3399/rk3399_roc_pc_plus/rk3399_roc_pc_plus.mk)里面BOARD_HAS_GPS参数为true,实现固件使能GPS功能,修改后重新编译SDK并烧录固件生效。
修改串口配置(串口节点或者波特率)
将SDK目录下
device/rockchip/rk3399/gps/u-blox.conf(Android7.1以上的版本为device/rockchip/rk3399/rk3399_roc_pc_plus/gps/u-blox.conf)里面SERIAL_DEVICE或者SERIAL_BAUD_RATE修改成对应模组配置的值,修改后重新编译SDK并烧录固件生效