1. Compile Linux firmware¶
1.1. Download Firefly_Linux_SDK¶
First prepare an empty folder to place SDK, better under home, here we use ~/proj as example.
Attention:
1. SDK uses cross-compile, so download SDK to your X86_64 PC, do not download SDK to arm64 board.
2. Build environment needs to be Ubuntu18.04 (real PC or docker container), other versions may cause build failure.
3. Do not put SDK under shared directory of VM or non-English path.
4. Please get/build SDK as a normal user, root privilege are neither allowed nor required (except installing sth. with apt)
Very important:
Before development, please update the SDK to the latest version according to the WIKI, especially for users who use the CS-R1 cluster server (if the code version of the CS-R1 user is too old and the software level configuration does not match the hardware, it may cause hardware damage).
For CORE-1126-JD4/CORE-1109-JD4 series, please download rv1126_rv1109_linux_release Linux SDK package.
If you want to develop UVC applications for the CORE-1126-JD4/CORE-1109-JD4 series, please download the rv1126_rv1109_linux_ai_camera_release Linux SDK package.
1.1.1. SDK Development Kit Description¶
rv1126_rv1109_linux_release SDK Description:
CORE-1126-JD4/CORE-1109-JD4series products can develop IPC firmware (IPC is the network camera)CAM-C1126S2U/CAM-C1109S2Useries products can develop Facial_gate firmware (Facial_gate is the face recognition gate)
rv1126_rv1109_linux_ai_camera_release SDK description:
CORE-1126-JD4/CORE-1109-JD4series products can develop AI_UVC firmware (UVC means driver-free camera)CAM-C1126S2U/CAM-C1109S2Useries products can develop AI_UVC firmware (UVC means driver-free camera)
Full SDK and BSP SDK Description:
rv1126_rv1109_linux_release and rv1126_rv1109_linux_ai_camera_release are both FULL SDKs.
rv1126_rv1109_linux_bsp_release and rv1126_rv1109_linux_ai_camera_bsp_release are both BSP SDKs.
The difference between the FULL SDK and the BSP SDK:
The FULL SDK can compile the buildroot system. The file size is relatively large. It contains the hardware acceleration file directory provided by rockchip. It is recommended to pull the FULL SDK for the first use.
The BSP SDK cannot compile the buildroot system. But the file size is relatively small. It is provided to customers who only need to update the partition firmware such as u-boot and kernel based on the public version of the firmware.
The similarities between the FULL SDK and the BSP SDK:
Both can compile and package Debian10 firmware.
1.1.2. Install Tools¶
sudo apt update
sudo apt install -y repo git python
1.1.3. Init Code Repository¶
Method One
Download via repo, you can choose to get FULL SDK or BSP SDK:
rv1126_rv1109_linux_releaseFULL SDK pull method
mkdir ~/proj/rv1126_sdk/
cd ~/proj/rv1126_sdk/
repo init --no-clone-bundle --repo-url https://gitlab.com/firefly-linux/git-repo.git --no-repo-verify -u https://gitlab.com/firefly-linux/manifests.git -b master -m rv1126_rv1109_linux_release.xml
repo sync -c
# You need to repeatedly confirm whether the code download is successful
rv1126_rv1109_linux_bsp_releaseBSP SDK pull method
mkdir ~/proj/rv1126_sdk/
cd ~/proj/rv1126_sdk/
repo init --no-clone-bundle --repo-url https://gitlab.com/firefly-linux/git-repo.git --no-repo-verify -u https://gitlab.com/firefly-linux/manifests.git -b master -m rv1126_rv1109_linux_bsp_release.xml
repo sync -c
# You need to repeatedly confirm whether the code download is successful
rv1126_rv1109_linux_ai_camera_releaseFULL SDK pull method
mkdir ~/proj/rv1126_sdk_ai/
cd ~/proj/rv1126_sdk_ai/
repo init --no-clone-bundle --repo-url https://gitlab.com/firefly-linux/git-repo.git --no-repo-verify -u https://gitlab.com/firefly-linux/manifests.git -b master -m rv1126_rv1109_linux_ai_camera_release.xml
repo sync -c
# You need to repeatedly confirm whether the code download is successful
rv1126_rv1109_linux_ai_camera_bsp_releaseBSP SDK pull method
mkdir ~/proj/rv1126_sdk_ai/
cd ~/proj/rv1126_sdk_ai/
repo init --no-clone-bundle --repo-url https://gitlab.com/firefly-linux/git-repo.git --no-repo-verify -u https://gitlab.com/firefly-linux/manifests.git -b master -m rv1126_rv1109_linux_ai_camera_bsp_release.xml
repo sync -c
# You need to repeatedly confirm whether the code download is successful
Note: The default repo tool uses python2 to pull code. If the Linux PC system is relatively new, the default version may be python3. If the code cannot be pulled, please manually set the python version of the Linux PC system to python2. And use the .repo/repo/repo tool in the current directory to pull the code. View the default python version of the Linux PC system:
$ ls -l /usr/bin/python
lrwxrwxrwx 1 root root 9 4月 16 2018 /usr/bin/python -> python2.7*
Method Two
Download Firefly_Linux_SDK sub-volume compressed package: Linux SDK
Note: This method can only obtain the complete SDK. The BSP SDK needs to be obtained using method 1.
rv1126_rv1109_linux_releaseSDK download
After downloading, verify the MD5 code:
md5sum rv1126_rv1109_linux_release_20211022.tgz
596c6bc6bb3095aea97d54c9df4cf333
After confirming that it is correct, you can unzip:
mkdir -p ~/proj/rv1126_sdk
cd ~/proj/rv1126_sdk
mv /path/to/rv1126_rv1109_linux_release_20211022.tgz ./
tar xvf rv1126_rv1109_linux_release_20211022.tgz
# This compressed package contains a .repo directory. After decompression, perform the following operations in the current directory
.repo/repo/repo sync -l
.repo/repo/repo sync -c --no-tags
.repo/repo/repo start firefly --all
# You can use the following command to update the SDK later
.repo/repo/repo sync -c --no-tags
# Due to network environment and other reasons, the `.repo/repo/repo sync -c --no-tags` command may fail to update the code. You can execute it repeatedly.
rv1126_rv1109_linux_ai_camera_releaseSDK download
After downloading, verify the MD5 code:
md5sum rv1126_rv1109_linux_ai_camera_release_20210306.tgz
26fcb17ddd82a43d396eb3eac4b7479f
After confirming that it is correct, you can unzip:
mkdir -p ~/proj/rv1126_sdk_ai
cd ~/proj/rv1126_sdk_ai
mv /path/to/rv1126_rv1109_linux_ai_camera_release_20210306.tgz ./
tar xvf rv1126_rv1109_linux_ai_camera_release_20210306.tgz
# This compressed package contains a .repo directory. After decompression, perform the following operations in the current directory
.repo/repo/repo sync -l
.repo/repo/repo sync -c --no-tags
.repo/repo/repo start firefly --all
# You can use the following command to update the SDK later
.repo/repo/repo sync -c --no-tags
# Due to network environment and other reasons, the `.repo/repo/repo sync -c --no-tags` command may fail to update the code. You can execute it repeatedly.
1.1.4. Synchronize Code¶
Execute the following command to synchronize code:
Enter the root directory of rv1126_rv1109_linux_release SDK
cd ~/proj/rv1126_sdk
Enter the root directory of rv1126_rv1109_linux_ai_camera_release SDK
cd ~/proj/rv1126_sdk_ai
Synchronize command
.repo/repo/repo sync -c --no-tags
.repo/repo/repo start firefly --all
You can use the following command to update the SDK later:
.repo/repo/repo sync -c --no-tags
Due to network environment and other reasons, .repo/repo/repo sync -c --no-tags The command to update the code may fail and can be executed repeatedly.
1.2. Linux SDK Configuration Introduction¶
1.2.1. Directory¶
$ tree -L 1
.
├── app
├── buildroot # Buildroot root filesystem build directory
├── build.sh -> device/rockchip/common/build.sh # Compile script
├── device # Compile related configuration files
├── docs # Documentation
├── envsetup.sh -> buildroot/build/envsetup.sh
├── external
├── kernel
├── Makefile -> buildroot/build/Makefile
├── mkfirmware.sh -> device/rockchip/common/mkfirmware.sh # Link script
├── prebuilts # Cross compilation toolchain
├── rkbin
├── rkflash.sh -> device/rockchip/common/rkflash.sh # Flash script
├── tools # Tools directory
├── u-boot
1.2.2. Introduction to configuration files¶
In the device/rockchip/rv1126_rv1109/ directory, there are configuration files (xxxx.mk) for different board types, which are used to manage the compilation configuration of each project of the SDK. The relevant configuration introduction:
# Target arch
export RK_ARCH=arm # 32-bit ARM architecture
# Uboot defconfig
export RK_UBOOT_DEFCONFIG=xxxx_defconfig # u-boot configuration file
# Kernel defconfig
export RK_KERNEL_DEFCONFIG=xxxx_defconfig # kernel configuration file
# Kernel defconfig fragment
export RK_KERNEL_DEFCONFIG_FRAGMENT=xxxx.config # kernel configuration file (fragment)
# Kernel dts
export RK_KERNEL_DTS=xxxx.dts # dts file
# parameter for GPT table
export RK_PARAMETER=parameter-xxxx.txt # partition table
# rootfs image path
export RK_ROOTFS_IMG=ubuntu_rootfs/rootfs.img # root file system path
1.2.3. Partition table¶
1.2.3.1. parameter¶
The parameter.txt file contains the partition information of the firmware. Take parameter-ubuntu-fit.txt as an example:
path: device/rockchip/rv1126_rv1109/parameter-xxxxxx-fit.txt
FIRMWARE_VER: 8.1
MACHINE_MODEL: RV1126
MACHINE_ID: 007
MANUFACTURER: RV1126
MAGIC: 0x5041524B
ATAG: 0x00200800
MACHINE: 0xffffffff
CHECK_MASK: 0x80
PWR_HLD: 0,0,A,0,1
TYPE: GPT
CMDLINE: mtdparts=rk29xxnand:0x00002000@0x00004000(uboot),0x00002000@0x00006000(misc),0x00010000@0x00008000(boot),0x00010000@0x00018000(recovery),0x00010000@0x00028000(backup),0x00300000@0x00038000(rootfs),0x00060000@0x00338000(oem),0x00400000@0x00398000(userdata),-@0x00798000(media:grow)
uuid:rootfs=614e0000-0000-4b53-8000-1d28000054a9
The CMDLINE attribute is where we are concerned. Take uboot as an example. In 0x00002000@0x00004000(uboot), 0x00004000 is the starting position of the uboot partition, 0x00002000 is the size of the partition, and so on.
1.2.3.2. package-file¶
The package-file is used to determine the required partition image and image path when packaging the firmware, and it needs to be consistent with the parameter.txt.
path: tools/linux/Linux_Pack_Firmware/rockdev/rv1126_rv1109-package-file
# NAME Relative path
#
#HWDEF HWDEF
package-file package-file
bootloader Image/MiniLoaderAll.bin
parameter Image/parameter.txt
#
# if uboot.img is fit, uboot.img had include uboot and trust,
# so ignore trust.img
# file Image/uboot.img
# Image/uboot.img: Device Tree Blob version 17
#
# trust Image/trust.img
#
uboot Image/uboot.img
misc Image/misc.img
#resource Image/resource.img
#kernel Image/kernel.img
boot Image/boot.img
recovery Image/recovery.img
rootfs Image/rootfs.img
oem Image/oem.img
userdata Image/userdata.img
# 要写入backup分区的文件就是自身(update.img)
# SELF 是关键字,表示升级文件(update.img)自身
# 在生成升级文件时,不加入SELF文件的内容,但在头部信息中有记录
# 在解包升级文件时,不解包SELF文件的内容。
backup RESERVED
#update-script update-script
#recover-script recover-script
1.3. Compile Debian firmware¶
This chapter introduces the compilation process of Debian firmware. It is recommended to develop under Ubuntu 18.04 system environment. If you use other system versions, you may need to adjust the compilation environment accordingly.
The compilation portion of this tutorial works with SDK versions above v2.2.5f
$ realpath .repo/manifest.xml
/home/lvsx/project/rv1126_rv1109/.repo/manifests/rv1126_rv1109/rv1126_rv1109_linux_release_20240117_v2.2.5f.xml
1.3.1. Preparatory work¶
1.3.1.1. Set up compilation environment¶
sudo apt-get install repo git ssh make gcc libssl-dev liblz4-tool \
expect g++ patchelf chrpath gawk texinfo chrpath diffstat binfmt-support \
qemu-user-static live-build bison flex fakeroot cmake gcc-multilib g++-multilib \
unzip \
device-tree-compiler ncurses-dev \
1.3.2. Compile SDK¶
1.3.2.1. Pre-compilation configuration¶
In the device/rockchip/rv1126_rv1109/ directory, there are configuration files for different board types. Select the configuration file:
1.3.2.2. Compile Debian firmware¶
Pre-compilation configuration for V2 mipi screen (old version screen, which has been discontinued)
./build.sh aio-rv1109-jd4-BE-45-debian.mk
Compile V3 mipi screen configuration
./build.sh aio-rv1109-jd4-mipi101-BSD1218-A101KL68-debian.mk
1.3.2.3. Build¶
1.3.2.3.1. Automatic compilation¶
Download: Debian rootfs(32-bit),put in SDK path
7z x debian10_rootfs_2022_12_22.7z
mkdir ubuntu_rootfs
mv rootfs.img ubuntu_rootfs/rootfs.img
start compiling
./build.sh
the firmware will be saved to the directory rockdev/pack/.
1.3.2.3.2. Partial compilation¶
u-boot
./build.sh uboot
kernel
./build.sh kernel
recovery
./build.sh recovery
Download: Debian rootfs(32-bit),put in SDK path
7z x debian10_rootfs_2022_12_22.7z
mkdir ubuntu_rootfs
mv rootfs.img ubuntu_rootfs/rootfs.img
Update each part of the
.imglink to the directoryrockdev/:
./mkfirmware.sh
Pack the firmware, the firmware will be saved to the directory
rockdev/pack/.
./build.sh updateimg
1.4. Compile Buildroot firmware¶
This chapter introduces the compilation process of Buildroot firmware. It is recommended to develop under Ubuntu 18.04 system environment. If you use other system versions, you may need to adjust the compilation environment accordingly.
The compilation portion of this tutorial works with SDK versions above v2.2.5f
$ realpath .repo/manifest.xml
/home/lvsx/project/rv1126_rv1109/.repo/manifests/rv1126_rv1109/rv1126_rv1109_linux_release_20240117_v2.2.5f.xml
1.4.1. Preparatory work¶
1.4.1.1. Set up compilation environment¶
sudo apt-get install repo git ssh make gcc libssl-dev liblz4-tool \
expect g++ patchelf chrpath gawk texinfo chrpath diffstat binfmt-support \
qemu-user-static live-build bison flex fakeroot cmake gcc-multilib g++-multilib \
unzip \
device-tree-compiler ncurses-dev \
1.4.2. Compile SDK¶
1.4.2.1. Precompile Configuration¶
There are configuration files for different board in device/rockchip/rv1126_rv1109/, select the configuration file:
rv1126_rv1109_linux_release SDK and rv1126_rv1109_linux_bsp_release SDK Select configuration file:
# V2 MIPI screen (old version screen, this screen has been discontinued)
./build.sh aio-rv1109-jd4-BE-45.mk
# V3 MIPI screen
./build.sh aio-rv1109-jd4-mipi101-BSD1218-A101KL68.mk
rv1126_rv1109_linux_ai_camera_release SDK and rv1126_rv1109_linux_ai_camera_bsp_release SDK select configuration file:
CORE-1126-JD4/CORE-1109-JD4 series products are not very compatible with UVC function. Customers with the ability are requested to choose this configuration file for compilation.
./build.sh aio-rv1109-uvcc.mk
1.4.2.2. Build¶
1.4.2.2.1. Automatic compilation¶
start compiling
./build.sh
the firmware will be saved to the directory rockdev/pack/.
1.4.2.2.2. Partial compilation¶
u-boot
./build.sh uboot
kernel
./build.sh kernel
recovery
./build.sh recovery
buildroot
./build.sh rootfs
Update each part of the
.imglink to the directoryrockdev/:
./mkfirmware.sh
Pack the firmware, the firmware will be saved to the directory
rockdev/pack/.
./build.sh updateimg
1.5. Compile Thunder-boot firmware¶
Currently, the latest SDK of CORE-1126-JD4 has been adapted to Quickboot. Compile Quickboot firmware options:
# Compile CORE-1126-JD4 V1.1 Quickboot firmware The adapted screen is DM-M10R800 V2 screen module
./build.sh device/rockchip/rv1126_rv1109/aio-rv1126-jd4-BE-45-tb-v11.mk
After the Quickboot firmware is started, the MIPI DM-M10R800 V2 screen module can preview the camera screen. If connected to the network, you can also preview the camera push rtsp.
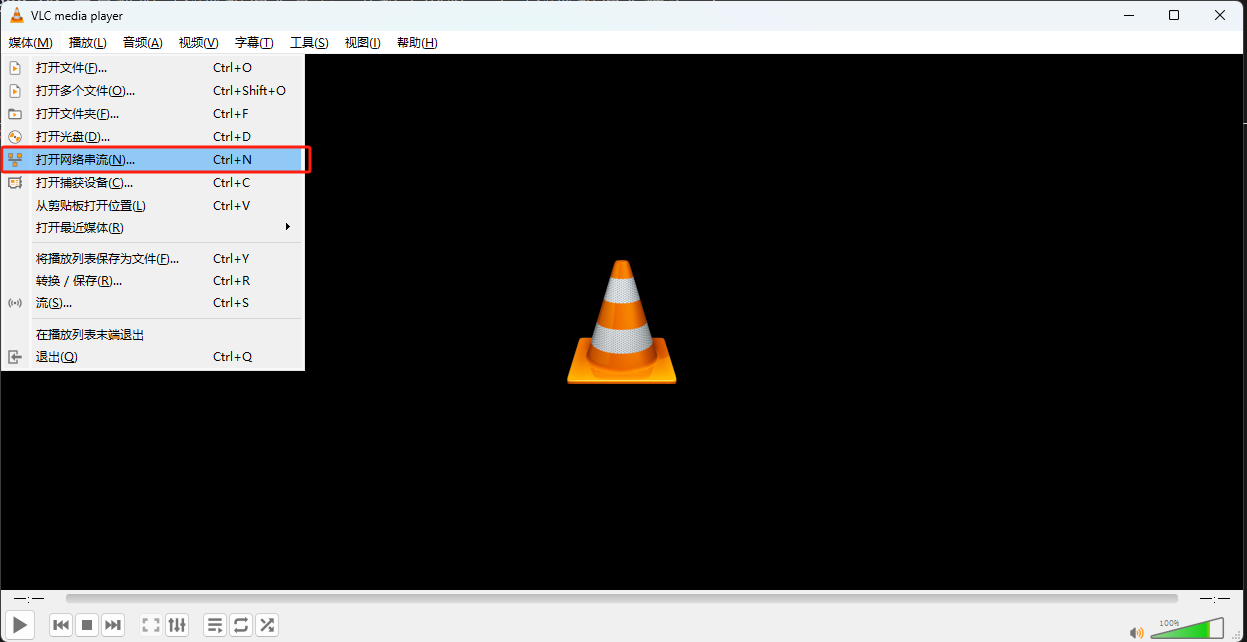
Linux PC preview command:
vlc rtsp://<device ip address>
Windows PC needs to download the vlc application and enter the streaming address to preview.
 Note: This quick start firmware is only applicable to the CORE-1126-JD4 V1.1 version of the core board. For the core board version, please refer to the silk screen on the hardware.
Note: This quick start firmware is only applicable to the CORE-1126-JD4 V1.1 version of the core board. For the core board version, please refer to the silk screen on the hardware.