8. SPI Use¶
SPI is a kind of high-speed, full duplex, synchronous serial communication interface, and is used for connecting microcontroller, sensor and storage device. This text takes fingerprint identification module as the example to briefly introduce the use of SPI.
8.1. SPI working mode¶
SPI works by master-slave mode. This mode generally requires one master device and one or more slave devices, and at least 4 wires, which respectively are:
CS Chip Selection signal
SCLK clock signal
MOSI master output and slave input
MISO master input and slave output
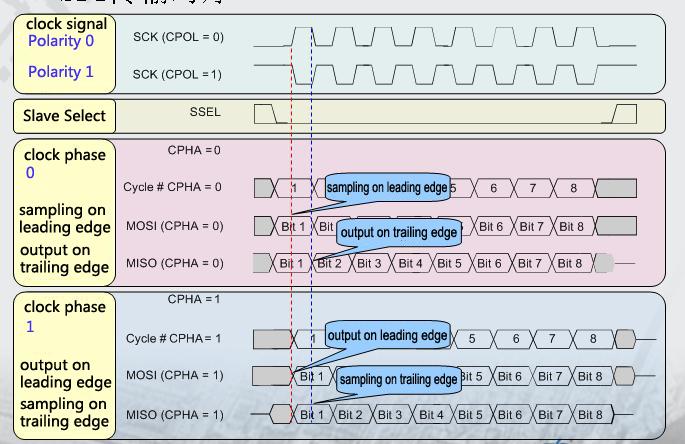
Linux kernel uses the combinations of CPOL and CPHA to express the current working mode of SPI (four modes):
CPOL=0, CPHA=0 SPI_MODE_0
CPOL=0, CPHA=1 SPI_MODE_1
CPOL=1, CPHA=0 SPI_MODE_2
CPOL=1, CPHA=1 SPI_MODE_3
CPOL: state of initial level of clock signal, 0 represents low level, 1 represents high level.
CPHA: clock edge where sampling occurs, 0 represents sampling at the first clock edge, 1 represents sampling at the second clock edge.
The oscillograms of four working modes of SPI are shown below:
8.2. Add own driver file in the kernel¶
Create a new driver file under the kernel source code catalog kernel/drivers/spi/, for example: spi-rockchip-firefly.c; add corresponding driver file configurations in the Kconfig file under the catalog where the driver file locates, for example:
@@ -525,6 +525,10 @@ config SPI_ROCKCHIP_TEST
bool "ROCKCHIP spi test code"
depends on SPI_ROCKCHIP
+config SPI_ROCKCHIP_FIREFLY
+ bool "ROCKCHIP spi firefly code"
+ depends on SPI_ROCKCHIP
+
#
# There are lots of SPI device types, with sensors and memory
# being probably the most widely used ones.
Add corresponding driver file name in the Makefile file under the catalog where the driver file locates, for example:
+obj-$(CONFIG_SPI_ROCKCHIP_FIREFLY) += spi-rockchip-firefly.o
Select the added driver file in the kernel option with make menuconfig, for example:
There is no help available for this option.
│ Symbol: SPI_ROCKCHIP_FIREFLY [=y]
│ Type : boolean
│ Prompt: ROCKCHIP spi firefly code
│ Location:
│ -> Device Drivers
│ -> SPI support (SPI [=y])
│ -> ROCKCHIP SPI controller core support (SPI_ROCKCHIP_CORE [=y])
│ -> ROCKCHIP SPI interface driver (SPI_ROCKCHIP [=y])
│ Defined at drivers/spi/Kconfig:528
│ Depends on: SPI [=y] && SPI_MASTER [=y] && SPI_ROCKCHIP [=y]
8.3. Define and register SPI device¶
Add description of SPI driver node in DTS, as shown below: kernel/arch/arm/boot/dts/firefly-rk3288.dts.
&spi0 {
status = "okay";
max-freq = <24000000>;
spidev@00 {
compatible = "rockchip,spi_firefly";
reg = <0x00>;
spi-max-frequency = <14000000>;
spi-cpha = <1>;
//spi-cpol = <1>;
};
};
status: if SPI is to be enabled, set as okay; if not, set as disable.
spidev@00: this example uses SPI0 and CS0, so that this should be set as 00; if CS1 is used, set as 01.
compatible: this property must coincide to the member compatible in structure of_device_id of the driver.
reg: this should coincide to spidev@00, and in this example, it is set as : 0x00;
spi-max-frequency: this is to set the maximum frequency used by spi.
spi-cpha, spi-cpol: this is to set the working mode of SPI. The SPI working mode of the module used in this example is SPI_MODE_1, so that spi-cpha = <1>;if the working mode of the device you use is SPI_MODE0, these two properties should be commented out; if SPI_MODE3 is used, set as: spi-cpha = <1>;spi-cpol = <1>.
8.4. Define and register SPI driver¶
8.4.1. Define SPI driver¶
Before defining SPI driver, the user should firstly define the variable of_device_id. of_device_id is used for calling the device information defined in dts file in the driver, and the definitions are shown below:
static const struct of_device_id spidev_dt_ids[] = {
{ .compatible = "rockchip,spi_firefly" },
{},
};
The compatible here should coincide to the DTS file.
Definition of spi_driver is shown below:
static struct spi_driver spidev_spi_driver = {
.driver = {
.name = "silead_fp",
.owner = THIS_MODULE,
.of_match_table = of_match_ptr(spidev_dt_ids),
},
.probe = spi_gsl_probe,
.remove = spi_gsl_remove,
};
8.4.2. Register SPI driver¶
Create a character device in the initialization function static int __init spidev_init(void):
alloc_chrdev_region(&devno, 0,255, "sileadfp");
Add this device to the kernel:
spidev_major = MAJOR(devno);
cdev_init(&spicdev, &spidev_fops);
spicdev.owner = THIS_MODULE;
status = cdev_add(&spicdev,MKDEV(spidev_major, 0),N_SPI_MINORS);
Create device class:
class_create(THIS_MODULE, "spidev");
Register SPI driver to the kernel:
spi_register_driver(&spidev_spi_driver);
When kernel starts, successful matching will call the probe function of this driver. The probe function is shown below:
static int spi_gsl_probe(struct spi_device *spi)
{
struct spidev_data *spidev;
int status;
unsigned long minor;
struct gsl_fp_data *fp_data;
printk("===============spi_gsl_probe ==============\n");
if(!spi)
return -ENOMEM;
/* Allocate driver data */
spidev = kzalloc(sizeof(*spidev), GFP_KERNEL);
if (!spidev)
return -ENOMEM;
/* Initialize the driver data */
spidev->spi = spi;
spin_lock_init(&spidev->spi_lock);// initialization spin lock
mutex_init(&spidev->buf_lock);// initialization Mutex lock
INIT_LIST_HEAD(&spidev->device_entry);// initialization device chain table
//init fp_data
fp_data = kzalloc(sizeof(struct gsl_fp_data), GFP_KERNEL);
if(fp_data == NULL){
status = -ENOMEM;
return status;
}
//set fp_data struct value
fp_data->spidev = spidev;
mutex_lock(&device_list_lock);//upper Mutex lock
minor = find_first_zero_bit(minors, N_SPI_MINORS);//search the first bit whose value is 0 in the memory area
if (minor < N_SPI_MINORS) {
struct device *dev;
spidev->devt = MKDEV(spidev_major, minor);
dev = device_create(spidev_class, &spi->dev, spidev->devt, spidev, "silead_fp_dev"); create device node under /dev/
status = IS_ERR(dev) ? PTR_ERR(dev) : 0;
} else {
dev_dbg(&spi->dev, "no minor number available!\n");
status = -ENODEV;
}
if (status == 0) {
set_bit(minor, minors);
list_add(&spidev->device_entry, &device_list);//add to device chain table
}
mutex_unlock(&device_list_lock);//unlock Mutex lock
if (status == 0)
spi_set_drvdata(spi, spidev);
else
kfree(spidev);
printk("%s:name=%s,bus_num=%d,cs=%d,mode=%d,speed=%d\n",__func__,spi->modalias, spi->master->bus_num, spi->chip_select, spi->mode,
spi->max_speed_hz);//print SPI information
return status;
}
If SPI driver is registered successfully, you can see the name of driver you register under /dev/ catalog, and can see the class of driver device you register under sys/class/.
8.5. SPI data reading and writing processes¶
8.5.1. SPI data writing¶
static ssize_t spidev_write(struct file *filp, const char __user *buf, size_t count, loff_t *f_pos)
{
struct spidev_data *spidev;
ssize_t status = 0;
unsigned long missing;
if (count > bufsiz)
return -EMSGSIZE;
spidev = filp->private_data;
mutex_lock(&spidev->buf_lock);
missing = copy_from_user(spidev->buffer, buf, count);//transfer the data from user space to kernel space
if (missing == 0) {
status = spidev_sync_write(spidev, count);//call write synchronization function
} else
status = -EFAULT;
mutex_unlock(&spidev->buf_lock);
return status;
}
Write synchronization function:
spidev_sync_write(struct spidev_data *spidev, size_t len)
{
struct spi_transfer t = {
.tx_buf = spidev->buffer,//send buffer
.len = len,//send data length
};
struct spi_message m;
spi_message_init(&m);// initialization spi_message
spi_message_add_tail(&t, &m);//add new spi_transfer to the tail of spi_message queue
return spidev_sync(spidev, &m);// synchronized reading and writing
}
8.5.2. SPI data reading¶
In the module used in this example, data reading process is:
The host computer writes register address and read instruction to the module (e.g.: address is 0xf0, read instruction is 0x00)
After the module receives read instruction, the data will be transmitted in the form of page
The host computer sets read mode
The host computer reads nne page of data and store such data
static ssize_t
spidev_read(struct file *filp, char __user *buf, size_t count, loff_t *f_pos)
{
struct spidev_data *spidev;
int status = 0;
int i = 0;
spidev = filp->private_data;
mutex_lock(&spidev->buf_lock);
gsl_fp_write(spidev, 0x00, 0xf0);//before reading, firstly write read instruction and register address to the module
while(1){
for(i=0;i <= 110*118/128/read_pages;i++){
status = gsl_fp_getOneFrame(spidev,0x00);//read data on Page 1
}
pos = 0;
break;
}
if(status > 0){
printk("gsl read data success!!!\n");
}else{
printk("gsl read data failed!!!");
}
mutex_unlock(&spidev->buf_lock);
return status;
}
static inline unsigned int
gsl_fp_getOneFrame(struct spidev_data *spidev,unsigned char reg_8b)
{
int status,i;
unsigned char buf_d[128*1+3] = {0x00,0x00};
struct spi_transfer t;
t.tx_buf = buf_d;
t.rx_buf = buf_d;
t.len = 131;
status = gsl_spidev_sync_read(spidev, &t);
if (status > 0){
for(i=0;i<128*read_pages;i++)
kmalloc_area[pos++] = buf_d[i+3];
}
return status;
}
static inline ssize_t
gsl_spidev_sync_read(struct spidev_data *spidev,struct spi_transfer *t)
{
struct spi_message m;
spi_message_init(&m);
t->bits_per_word = 8;//The data length of each reading is 8 bits
t->delay_usecs = 1;//delay after each reading
t->speed_hz = 14*1000*1000;//reading rate
t->cs_change = 1;//change of CS pin level
spi_message_add_tail(t, &m);
return spidev_sync(spidev, &m);
}
Note: SPI driver of Firefly is a universal driver under Linux; refer to the source code: kernel/drivers/spi/spidev.c.