
MIPI CSI 使用¶
简介¶
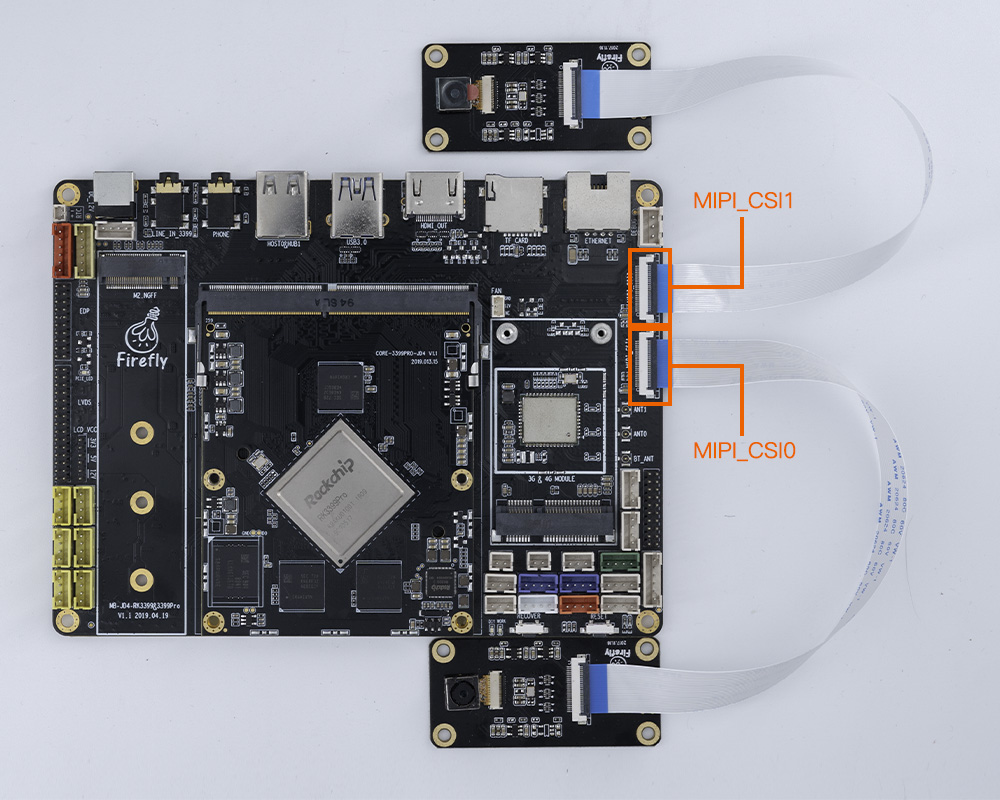
AIO-3399Pro-JD4 开发板分别带有两个MIPI,MIPI最高支持支持4K拍照,并支持1080P 30FPS以上视频录制。此外,开发板还支持 USB 摄像头。
本文以 OV13850 摄像头为例,讲解在该开发板上的配置过程。
接口效果图¶
DTS配置¶
isp0: isp@ff910000 {
…
status = "okay";
}
isp1: isp@ff920000 {
…
status = "okay";
}
驱动说明¶
与摄像头相关的代码目录如下:
hal3_camera :
├── AAL Android Abstraction Layer负责与 framework 交互
├── common 公用文件,如线程,消息处理,Log 打印等实现
│ ├── gcss xml 解析相关
│ ├── imageProcess 图像处理相关,如 scale
│ ├── jpeg jpeg 编码相关
│ ├── mediacontroller media pipeline 相关
│ ├── platformdata hal3 能力支持的属性,主要是管理从 xml 获取到的属性
│ ├── utils 目前只有一个 Error.h,定义了一些返回值
│ └── v4l2dev 封装了一些与 v4l2 驱动交互的具体 io
├── etc 配置文件目录
├── include Control loop 的头文件,buffer_manager 相关头文件
├── lib 3a engine 相关库
├── psl Physical Layer,物理实现层,所有的实现逻辑基本都在这里
│ └── rkisp1 目前只有 Rkisp1 一套实现方案
│ ├── tasks 基本只用到了里面的几个 Notify 的接口类和 JpegEncodeTask
│ └── workers 数据的获取处理都在这里
└── tools 包含了一个自动生成 graph setting xml 的 Python 脚本
Linux Kernel-4.4:|
|-- arch/arm64/boot/dts/rockchip DTS 配置文件
|-- drivers/phy/rockchip/ mipi dphy 驱动
|-- phy-rockchip-mipi-rx.c
|-- drivers/media|
|-- platform/rockchip/isp1 rkisp1 isp 驱动
|-- capture.c 包含 mp/sp 的配置及 vb2,帧中断处理
|-- dev.c 包含 probe、异步注册、clock、pipeline、iommu 及 media/v4l2 framework
|-- isp_params.c 3A 相关参数设置
|-- isp_stats.c 3A 相关统计
|-- regs.c 寄存器相关的读写操作
|-- rkisp1.c 对应 isp_sd entity 节点,包含从 mipi 接收数据,并有 crop 功能
|-- i2c/
|-- ov13850.c CIS(cmos image sensor)驱动
|-- vm149c.c VCM driver ic 驱动
|-- spi/ rk1608 ap driver 驱动
|-- rk1608.c 注册 rk1608 spi 设备
|-- rk1608_dev.c 注册/dev/rk_preisp misc 设备
|-- rk1608_dphy.c 注册 v4l2 media 节点,与 rk1608 和 AP 端交互
配置原理¶
设置摄像头相关的引脚和时钟,即可完成配置过程。 从以下摄像头接口原理图可知,需要配置的引脚有:MIPI_PWR, MIPI_PDN0_CAM/MIPI_PDN1_CAM和RST_CAM_0/1。
mipi接口
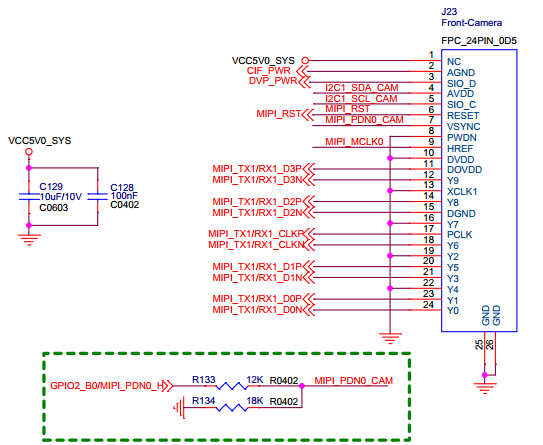
MIPI_PWR 对应 RK3399Pro 的 GPIO0_B5;
MIPI_PDN0_CAM/MIPI_PDN1_CAM 对应 RK3399Pro 的 GPIO2_A1 / GPIO2_A0;
MIPI_RST0/MIPI_RST1 对应RK3399Pro 的 GPIO1_C4;
在开发板中,这三个引脚都是在 kernel/arch/arm64/boot/dts/rockchip/rk3399pro-firefly-usbacm.dtsi 中设置。
配置步骤¶
配置 ov13850驱动和VCM驱动¶
修改kernel/arch/arm64/boot/dts/rockchip/rk3399pro-firefly-usbacm.dtsi 初始化摄像头:
{
vcc_mipi: vcc_mipi {
compatible = "regulator-fixed";
enable-active-high;
gpio = <&gpio3 29 GPIO_ACTIVE_HIGH>;
pinctrl-names = "default";
pinctrl-0 = <&dvp_pwr>;
regulator-name = "vcc_mipi";
};
};
.....
&i2c1 {
vm149c: vm149c@0c {
compatible = "silicon touch,vm149c";
status = "okay";
reg = <0x0c>;
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "back";
};
ov13850b: ov13850b@10 {
compatible = "ovti,ov13850";
reg = <0x10>;
clocks = <&cru SCLK_CIF_OUT>;
clock-names = "xvclk";
avdd-supply = <&vcc_mipi>;
/* dvdd-supply = <>; */
/* dovdd-supply = <>; */
/* reset-gpios = <>; */
//mipi-pwr-gpios = <&gpio3 29 GPIO_ACTIVE_HIGH>;
reset-gpios = <&gpio2 6 GPIO_ACTIVE_HIGH>;
pwdn-gpios = <&gpio3 27 GPIO_ACTIVE_HIGH>;
//pinctrl-names = "rockchip,camera_default", "rockchip,camera_sleep";
//pinctrl-0 = <&cam0_default_pins>;
//pinctrl-1 = <&cam0_sleep_pins>;
pinctrl-names = "rockchip,camera_default";
pinctrl-0 = <&cif_clkout>;
firefly,clkout-enabled-index = <0>;
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "back";
rockchip,camera-module-name = "CMK-CT0116";
rockchip,camera-module-lens-name = "Largan-50013A1";
lens-focus = <&vm149c>;
port {
ucam_out0: endpoint {
remote-endpoint = <&mipi_in_ucam0>;
data-lanes = <1 2>;
};
};
};
vm149c_front: vm149c_front@0c {
compatible = "silicon touch,vm149c";
status = "okay";
reg = <0x0c>;
rockchip,camera-module-index = <1>;
rockchip,camera-module-facing = "front";
};
ov13850f: ov13850f@10 {
compatible = "ovti,ov13850";
reg = <0x10>;
clocks = <&cru SCLK_CIF_OUT>;
clock-names = "xvclk";
avdd-supply = <&vcc_mipi>;
//mipi-pwr-gpios = <&gpio3 29 GPIO_ACTIVE_HIGH>;
reset-gpios = <&gpio2 1 GPIO_ACTIVE_HIGH>;
pwdn-gpios = <&gpio3 28 GPIO_ACTIVE_HIGH>;
//pinctrl-names = "rockchip,camera_default", "rockchip,camera_sleep";
//pinctrl-0 = <&cam0_default_pins>;
//pinctrl-1 = <&cam0_sleep_pins>;
pinctrl-names = "rockchip,camera_default";
pinctrl-0 = <&cif_clkout>;
firefly,second-enabled-index = <1>;
firefly,clkout-enabled-index = <0>;
rockchip,camera-module-index = <1>;
rockchip,camera-module-facing = "front";
rockchip,camera-module-name = "CMK-CT0116";
rockchip,camera-module-lens-name = "Largan-50013A1";
lens-focus = <&vm149c_front>;
port {
ucam_out1: endpoint {
remote-endpoint = <&mipi_in_ucam1>;
data-lanes = <1 2>;
};
};
};
};
&pinctrl {
cam0 {
dvp_pwr: dvp-pwr {
rockchip,pins = <3 29 RK_FUNC_GPIO &pcfg_pull_up>;
};
};
};
修改ov13850驱动上电时序 kernel/drivers/media/i2c/ov13850.c
+static int __ov13850_power_on(struct ov13850 *ov13850);
+static void __ov13850_power_off(struct ov13850 *ov13850);
static int ov13850_s_power(struct v4l2_subdev *sd, int on)
{
struct ov13850 *ov13850 = to_ov13850(sd);
@@ -1055,6 +1058,7 @@ static int ov13850_s_power(struct v4l2_subdev *sd, int on)
goto unlock_and_return;
}
+ __ov13850_power_on(ov13850);
ret = ov13850_write_array(ov13850->client, ov13850_global_regs);
if (ret) {
v4l2_err(sd, "could not set init registers\n");
@@ -1063,9 +1067,20 @@ static int ov13850_s_power(struct v4l2_subdev *sd, int on)
}
ov13850->power_on = true;
+ /* export gpio */
+ if (!IS_ERR(ov13850->reset_gpio))
+ gpiod_export(ov13850->reset_gpio, false);
+ if (!IS_ERR(ov13850->pwdn_gpio))
+ gpiod_export(ov13850->pwdn_gpio, false);
} else {
pm_runtime_put(&client->dev);
+ __ov13850_power_off(ov13850);
ov13850->power_on = false;
+ /* unexport gpio */
+ if (!IS_ERR(ov13850->reset_gpio))
+ gpiod_unexport(ov13850->reset_gpio);
+ if (!IS_ERR(ov13850->pwdn_gpio))
+ gpiod_unexport(ov13850->pwdn_gpio);
}
根据sensor需求对__ov13850_power_on进行上电配置。
配置 Android¶
修改hardware/rockchip/camera/etc/camera/camera3_profiles_rk3399pro.xml 来注册摄像头:
<CameraSettings>
<Profiles cameraId="0" name="ov13850" moduleId="m00">
<Supported_hardware>
<hwType value="SUPPORTED_HW_RKISP1"/>
</Supported_hardware>
<Android_metadata> <!-- Android static metadata only -->
<!-- Color Correction -->
<colorCorrection.availableAberrationModes value="OFF"/>
<!-- Control -->
<control.availableModes value="AUTO"/>
<control.aeAvailableAntibandingModes value="OFF,50HZ,60Hz,AUTO"/>
<control.aeAvailableModes value="ON,OFF"/>
<control.aeLockAvailable value="FALSE"/>
<!-- <control.aeAvailableTargetFpsRanges value="15,30,30,30,60,60"/> -->
<control.aeAvailableTargetFpsRanges value="15,30,30,30"/>
<control.aeCompensationRange value="-6,6"/>
<control.aeCompensationStep value="1,3"/>
<control.afAvailableModes value="OFF,AUTO,MACRO,CONTINUOUS_VIDEO,CONTINUOUS_PICTURE,EDOF"/>
<control.availableEffects value="OFF"/>
<!-- <control.awbAvailableModes value="AUTO"/> -->
<control.awbAvailableModes value="AUTO,INCANDESCENT,FLUORESCENT,DAYLIGHT,CLOUDY_DAYLIGHT"/>
<control.awbLockAvailable value="false"/>
<control.availableSceneModes value="DISABLED"/>
<control.availableVideoStabilizationModes value="OFF"/>
<control.maxRegions value="1,0,1"/>
<!-- JPEG -->
<jpeg.maxSize value="19267584"/> <!-- w*h*1.5 -->
<!-- /* TODO */ -->
<!-- The aspect ratio of the largest thumbnail size will be same as the aspect ratio of largest JPEG output size -->
<!-- buf hw encode may not support such thumbnail size, so if we should change the jpeg output size? -->
<jpeg.availableThumbnailSizes value="0,0,128,96,160,96,160,120,256,196"/>
<!-- <jpeg.availableThumbnailSizes value="0,0,160,120,320,180,320,240"/> -->
<!-- Lens Info-->
<!-- TODO: availableApertures now is fake for we do not get the real apertures -->
<lens.info.availableApertures value="2.0"/> <!-- HAL may override this value from CMC for RAW sensors -->
<lens.info.availableFocalLengths value="2.04"/> <!-- HAL may override this value from CMC for RAW sensors -->
<lens.info.availableOpticalStabilization value="OFF"/> <!-- OPTIONS: OFF, ON -->
<lens.info.hyperfocalDistance value="0.0"/> <!-- HAL may override this value from CMC for RAW sensors -->
<lens.info.minimumFocusDistance value="0.1"/> <!-- HAL may override this value from CMC for RAW sensors -->
<!-- Lens -->
<lens.facing value="BACK"/>
<!-- Request -->
<request.maxNumOutputStreams value="1,2,1"/>
<request.pipelineMaxDepth value="4"/>
<request.maxNumInputStreams value="0"/>
<request.partialResultCount value="1"/>
<!-- <request.availableCapabilities value="BACKWARD_COMPATIBLE,YUV_REPROCESSING,PRIVATE_REPROCESSING"/> -->
<request.availableCapabilities value="BACKWARD_COMPATIBLE"/>
<request.availableRequestKeys value="blackLevel.lock,
colorCorrection.aberrationMode,
colorCorrection.gains,
colorCorrection.transform,
control.aeAntibandingMode,
control.aeExposureCompensation,
control.aeLock,
control.aeMode,
control.aeTargetFpsRange,
control.aePrecaptureTrigger,
control.afMode,
control.aeRegions,
control.afRegions,
control.afTrigger,
control.awbLock,
control.awbMode,
control.captureIntent,
control.effectMode,
control.mode,
control.sceneMode,
control.videoStabilizationMode,
edge.mode,
flash.mode,
jpeg.gpsLocation,
jpeg.orientation,
jpeg.quality,
jpeg.thumbnailQuality,
jpeg.thumbnailSize,
lens.aperture,
lens.focalLength,
lens.opticalStabilizationMode,
noiseReduction.mode,
scaler.cropRegion,
statistics.faceDetectMode,
statistics.hotPixelMapMode,
statistics.sceneFlicker,
statistics.lensShadingMapMode
"/>
<request.availableResultKeys value="colorCorrection.mode,
colorCorrection.transform,
colorCorrection.gains,
colorCorrection.aberrationCorrectionMode,
control.aeAntibandingMode,
control.aeExposureCompensation,
control.aeLock,
control.aeMode,
control.aeTargetFpsRange,
control.aePrecaptureTrigger,
control.afMode,
control.afRegions,
control.afTrigger,
control.awbLock,
control.awbMode,
control.captureIntent,
control.effectMode,
control.mode,
control.sceneMode,
control.videoStabilizationMode,
control.aeState,
control.afState,
control.awbState,
sync.frameNumber,
edge.mode,
flash.mode,
jpeg.gpsLocation,
jpeg.orientation,
jpeg.quality,
jpeg.thumbnailQuality,
jpeg.thumbnailSize,
lens.focalLength,
lens.aperture,
lens.opticalStabilizationMode,
request.pipelineDepth,
scaler.cropRegion,
sensor.testPatternData,
sensor.testPatternMode,
sensor.timestamp,
sensor.rollingShutterSkew,
statistics.faceDetectMode,
statistics.hotPixelMapMode,
statistics.faces,
noiseReduction.mode,
statistics.sceneFlicker,
statistics.lensShadingMapMode
"/>
<request.availableCharacteristicsKeys value="0"/>
<!-- Scaler -->
<scaler.availableMaxDigitalZoom value="4.0"/>
<scaler.availableInputOutputFormatsMap value="IMPLEMENTATION_DEFINED,2,YCbCr_420_888,BLOB,YCbCr_420_888,2,YCbCr_420_888,BLOB"/>
<scaler.availableStreamConfigurations value="
BLOB,4096x3136,OUTPUT,
BLOB,2112x1568,OUTPUT,
BLOB,1920x1080,OUTPUT,
BLOB,1280x960,OUTPUT,
BLOB,1280x720,OUTPUT,
BLOB,640x480,OUTPUT,
BLOB,352x288,OUTPUT,
BLOB,320x240,OUTPUT,
BLOB,176x144,OUTPUT,
YCbCr_420_888,2112x1568,OUTPUT,
YCbCr_420_888,1920x1080,OUTPUT,
YCbCr_420_888,1280x960,OUTPUT,
YCbCr_420_888,1280x720,OUTPUT,
YCbCr_420_888,640x480,OUTPUT,
YCbCr_420_888,352x288,OUTPUT,
YCbCr_420_888,320x240,OUTPUT,
YCbCr_420_888,176x144,OUTPUT,
IMPLEMENTATION_DEFINED,2112x1568,OUTPUT,
IMPLEMENTATION_DEFINED,1920x1080,OUTPUT,
IMPLEMENTATION_DEFINED,1280x960,OUTPUT,
IMPLEMENTATION_DEFINED,1280x720,OUTPUT,
IMPLEMENTATION_DEFINED,640x480,OUTPUT,
IMPLEMENTATION_DEFINED,352x288,OUTPUT,
IMPLEMENTATION_DEFINED,320x240,OUTPUT,
IMPLEMENTATION_DEFINED,176x144,OUTPUT"/>
<scaler.availableMinFrameDurations value="
BLOB,4096x3136,150000000,
BLOB,2112x1568,33333333,
BLOB,1920x1080,33333333,
BLOB,1280x960,33333333,
BLOB,1280x720,33333333,
BLOB,640x480,33333333,
BLOB,352x288,33333333,
BLOB,320x240,33333333,
BLOB,176x144,33333333,
YCbCr_420_888,2112x1568,33333333,
YCbCr_420_888,1920x1080,33333333,
YCbCr_420_888,1280x960,33333333,
YCbCr_420_888,1280x720,33333333,
YCbCr_420_888,640x480,33333333,
IMPLEMENTATION_DEFINED,2112x1568,33333333,
IMPLEMENTATION_DEFINED,1920x1080,33333333,
IMPLEMENTATION_DEFINED,1280x960,33333333,
IMPLEMENTATION_DEFINED,1280x720,33333333,
IMPLEMENTATION_DEFINED,640x480,33333333,
IMPLEMENTATION_DEFINED,352x288,33333333,
IMPLEMENTATION_DEFINED,320x240,33333333,
IMPLEMENTATION_DEFINED,176x144,33333333" />
<scaler.availableStallDurations value="
BLOB,4096x3136,150000000,
BLOB,2112x1568,33333333,
BLOB,1920x1080,33333333,
BLOB,1280x960,33333333,
BLOB,1280x720,33333333,
BLOB,640x480,33333333,
BLOB,352x288,33333333,
BLOB,320x240,33333333,
BLOB,176x144,33333333" />
<scaler.croppingType value="CENTER_ONLY"/>
<!-- Sensor Info -->
<sensor.info.activeArraySize value="0,0,4224,3136"/>
<sensor.info.sensitivityRange value="32,2400"/>
<sensor.info.colorFilterArrangement value="BGGR"/> <!-- HAL may override this value from CMC for RAW sensors -->
<sensor.info.exposureTimeRange value="100000,333333330"/>
<sensor.info.maxFrameDuration value="66666666"/>
<sensor.info.physicalSize value="5.5,4.5"/> <!-- 4224x1.12um 3136x1.12um -->
<sensor.info.pixelArraySize value="4224x3136"/>
<sensor.info.whiteLevel value="0"/> <!-- HAL may override this value from CMC for RAW sensors -->
<sensor.info.timestampSource value="UNKNOWN"/>
<!-- Sensor -->
<sensor.baseGainFactor value="0,1"/> <!-- HAL may override this value from CMC for RAW sensors -->
<sensor.blackLevelPattern value="0,0,0,0"/>
<sensor.maxAnalogSensitivity value="2400"/> <!-- HAL may override this value from CMC for RAW sensors -->
<sensor.orientation value="180"/>
<sensor.profileHueSatMapDimensions value="0,0,0"/>
<sensor.availableTestPatternModes value="OFF,COLOR_BARS"/>
<!-- Info -->
<info.supportedHardwareLevel value="LIMITED"/>
<!-- shading -->
<!-- <shading.availableModes value="OFF"/> -->
<!-- Statistics Info -->
<statistics.info.availableFaceDetectModes value="OFF"/>
<statistics.info.histogramBucketCount value="0"/>
<statistics.info.maxFaceCount value="0"/>
<statistics.info.availableHotPixelMapModes value="OFF"/>
<statistics.info.availableLensShadingMapModes value="OFF"/>
<!-- Flash -->
<flash.colorTemperature value="0"/>
<flash.maxEnergy value="0"/>
<!-- Flash info -->
<flash.info.available value="FALSE"/>
<flash.info.chargeDuration value="1000000"/>
<flash.maxEnergy value="10"/>
<!-- Sync -->
<sync.maxLatency value="PER_FRAME_CONTROL"/>
<!-- maxCaptureStall -->
<reprocess.maxCaptureStall value="4"/>
<!-- Edge -->
<edge.availableEdgeModes value="OFF,FAST,HIGH_QUALITY"/>
<!-- Noise Reduction -->
<noiseReduction.availableNoiseReductionModes value="OFF,FAST,HIGH_QUALITY"/>
</Android_metadata>
<!-- ******************PSL specific section start **************************************************************-->
<Hal_tuning_RKISP1> <!-- Parameters to tune the HAL and hacks for the HAL that are camera dependent -->
<flipping value="" value_v=""/> <!-- value: SENSOR_FLIP_H or "", value_v: SENSOR_FLIP_V or "" -->
<supportIsoMap value="false"/>
<supportTuningSize value="4224x3136, 2112x1568"/>
</Hal_tuning_RKISP1>
<Sensor_info_RKISP1> <!-- Information that parametrizes the behavior or qualities of the physical sensor -->
<sensorType value="SENSOR_TYPE_RAW"/> <!-- SENSOR_TYPE_SOC or SENSOR_TYPE_RAW -->
<exposure.sync value="true"/> <!-- compensate expsure sync-->
<sensor.digitalGain value="false"/> <!-- digital gain support on sensor-->
<gain.lag value="2"/> <!-- camera3 HAL CPF parameters moved here start-->
<exposure.lag value="2"/>
<fov value= "54.8" value_v="42.5"/>
<statistics.initialSkip value="1"/> <!-- camera3 HAL CPF parameters moved here end-->
<frame.initialSkip value="3"/> <!-- camera3 HAL CPF parameters moved here end-->
<isoAnalogGain1 value="75"/> <!--Pseudo ISO corresponding analog gain value 1.0. -->
<cITMaxMargin value="10"/> <!--coarse integration time max margin -->
</Sensor_info_RKISP1>
<!-- ******************PSL specific section end **************************************************************-->
主要修改的内容如下:
Sensor 名称
cameraId="0" //cameraId 后置为 0, 前置为 1, 只有一个 camera 时, 为 0
该名字必须与 Sensor 驱动的名字一致,目前提供的 Sensor 驱动格式如下:
name="ov13850"
moduleId="m00"
通过如下命令: adb shell cat /sys/class/video4linux/*/name 可以获取所有 v4l2 设备点节的名字,其中形如 m00_b_ov13850 1-0010 为 sensor 节点名称。 该命令规则中, m00 代表 moduleId ,主要为匹配 len,flash 之 用, ‘b’ 代表 camera 方向为后置,如果是前置则为‘f’,‘ov13850’代表 sensor name , ‘1-0010’ 代表 I2c 地址。
调试方法¶
(1) RKISP 驱动如果加载成功,会有 video 及 media 设备存在于/dev/目录下。系统中可能存在 多个/dev/video 设备,通过/sys 可以查询到 RKISP 注册的 video 节点。
console:/ # grep '' /sys/class/video4linux/video*/name
/sys/class/video4linux/video0/name:rkisp1_mainpath
/sys/class/video4linux/video1/name:rkisp1_selfpath
/sys/class/video4linux/video2/name:rkisp1_dmapath
/sys/class/video4linux/video3/name:rkisp1-statistics
/sys/class/video4linux/video4/name:rkisp1-input-params
/sys/class/video4linux/video5/name:rkisp1_mainpath
/sys/class/video4linux/video6/name:rkisp1_selfpath
/sys/class/video4linux/video7/name:rkisp1_dmapath
/sys/class/video4linux/video8/name:rkisp1-statistics
/sys/class/video4linux/video9/name:rkisp1-input-params
(2) 判断 camera 驱动是否加载成功 当所有的 camera 都注册完毕,kernel 会打印出如下的 log。
localhost ~ # dmesg | grep Async
[ 0.682982] rkisp1: Async subdev notifier completed
如发现 kernel 没有 Async subdev notifier completed 这行 log,那么请首先查看 sensor 是否有相关的报错,I2C 通讯是否成功。
(3) 调试上层相关信息
dumpsys media.camera
终端下可以直接修改/vendor/etc/camera/camera3_profiles.xml调试各参数并重启生效
FAQs¶
1.无法打开摄像头,首先确定sensor I2C是否通信。若不通则可检查mclk以及供电是否正常(Power/PowerDown/Reset/Mclk/I2cBus)分别排查 2.参考驱动列表ː ov8858.c Gc2145.c Ov7251 tc35874x.c